ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
以前の記事でUSBラズパイとかいう製品の存在価値が分からないと言いましたが、案の定叩かれているようです。そりゃそうだよなあ。買うことを検討している人は考え直したほうがいいと思う。
それはさておき。OiLのマーシャリング、アンマーシャリングの動作がどうにも不可解なので調べてみます。
CDRの先頭に1,255,255,255という謎の値がくっついているのは以前言った通りなのですが、TimedVelocity2D型、CameraImage型等で調べたところ、他の部分にも謎の値が挿入されてしまいます。
まずTimedVelocity2D型をマーシャリングすると以下のようになります。
格納されている値は全て0に設定してあるため、全て0になるはずですが、13~16にかけて255という値が挿入されています。
位置 値
1 1
TimedVelocity2D型について推測すると、structの変数の前に255が挿入されると推測されます。
位置 値
------------------------
CameraImage型は以下のようになります。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

それはさておき。OiLのマーシャリング、アンマーシャリングの動作がどうにも不可解なので調べてみます。
CDRの先頭に1,255,255,255という謎の値がくっついているのは以前言った通りなのですが、TimedVelocity2D型、CameraImage型等で調べたところ、他の部分にも謎の値が挿入されてしまいます。
まずTimedVelocity2D型をマーシャリングすると以下のようになります。
格納されている値は全て0に設定してあるため、全て0になるはずですが、13~16にかけて255という値が挿入されています。
位置 値
1 1
2 255
3 255
4 255
5 0
6 0
7 0
8 0
9 0
10 0
11 0
12 0
13 255
14 255
15 255
16 255
17 0
18 0
19 0
20 0
21 0
22 0
23 0
24 0
25 0
26 0
27 0
28 0
29 0
30 0
31 0
32 0
33 0
34 0
35 0
36 0
37 0
38 0
39 0
40 0
CameraImage型は以下のようになります。
これも全て0になるはずですが、255が挿入されています。
位置 値
CameraImage型は以下のようになります。
これも全て0になるはずですが、255が挿入されています。
位置 値
1 1
2 255
3 255
4 255
5 0
6 0
7 0
8 0
9 0
10 0
11 0
12 0
13 0
14 0
15 0
16 0
17 0
18 0
19 255
20 255
21 1
22 0
23 0
24 0
25 0
26 255
27 255
28 255
29 255
30 255
31 255
32 255
33 0
34 0
35 0
36 0
37 0
38 0
39 0
40 0
41 0
42 0
43 0
44 0
TimedVelocity2D型について推測すると、structの変数の前に255が挿入されると推測されます。
位置 値
------------------------
1 1
2 255
3 255
4 255
------------------------
Time(sec):unsigned long
------------------------
Time(sec):unsigned long
5 0
6 0
7 0
8 0
------------------------
Time(nsec):unsigned long
------------------------
Time(nsec):unsigned long
9 0
10 0
11 0
12 0
------------------------
------------------------
13 255
14 255
15 255
16 255
------------------------
Velocity2D(vx):double
------------------------
Velocity2D(vx):double
17 0
18 0
19 0
20 0
21 0
22 0
23 0
24 0
------------------------
Velocity2D(vy):double
------------------------
Velocity2D(vy):double
25 0
26 0
27 0
28 0
29 0
30 0
31 0
32 0
------------------------
Velocity2D(va):double
------------------------
Velocity2D(va):double
33 0
34 0
35 0
36 0
37 0
38 0
39 0
40 0
------------------------
------------------------
CameraImage型は以下のようになります。
位置 値
------------------------
なるほど。全く分かりません。アラインメントの問題なのでしょうか?
というわけで、OiLのalign関数をただ0を返す関数に置き換えました。
これで上記の255が消えて全て上手くいく・・・と思ったのですが、CameraImage型はomniORB等でマーシャリングするとアラインメントのためかbppとformatの間に0が2個入るため上手くいきません。この問題を解決するのは容易ではありません。
まあでも、これでとりあえずほとんどのデータ型で通信できるようになったはずなので、修正版0.2.1をリリースしました。
------------------------
1 1
2 255
3 255
4 255
------------------------
Time(sec):unsigned long
------------------------
Time(sec):unsigned long
5 0
6 0
7 0
8 0
------------------------
Time(nsec):unsigned long
------------------------
Time(nsec):unsigned long
9 0
10 0
11 0
12 0
------------------------
width:unsigned short
------------------------
width:unsigned short
13 0
14 0
------------------------
height:unsigned short
------------------------
height:unsigned short
15 0
16 0
------------------------
bpp:unsigned short
------------------------
bpp:unsigned short
17 0
18 0
------------------------
------------------------
19 255
20 255
------------------------
format:string
------------------------
format:string
21 1
22 0
23 0
24 0
25 0
------------------------
------------------------
26 255
27 255
28 255
29 255
30 255
31 255
32 255
------------------------
fDiv::double
------------------------
fDiv::double
33 0
34 0
35 0
36 0
37 0
38 0
39 0
40 0
------------------------
pixels:sequence<octet>
------------------------
pixels:sequence<octet>
41 0
42 0
43 0
44 0
なるほど。全く分かりません。アラインメントの問題なのでしょうか?
というわけで、OiLのalign関数をただ0を返す関数に置き換えました。
encoder.align = function(...)return 0 end
これで上記の255が消えて全て上手くいく・・・と思ったのですが、CameraImage型はomniORB等でマーシャリングするとアラインメントのためかbppとformatの間に0が2個入るため上手くいきません。この問題を解決するのは容易ではありません。
まあでも、これでとりあえずほとんどのデータ型で通信できるようになったはずなので、修正版0.2.1をリリースしました。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
USBラズパイなるものが発売されるらしいけど、一体ラズパイエミュレータと比べて何の利点があるのだろう・・・
一本9800円も払うんだったら普通にラズパイ買うだろうし、謎です。この製品を貶したいのではなく、ただ純粋に疑問です。
それはさておき、Dynamixel XM430-W350-RをOpenCM9.04-C+OpenCM 485拡張ボードに接続して動作確認しようとしたのですが、かなり詰まる部分があったのでメモしておきます。
まず、OpenCM9.04を使うにあたりOpenCM IDEを使って動作確認しようとしたのですが、これが何故か上手くいきませんでした。サンプルコードのDXL_BUS_SERIAL1を拡張ボード用にDXL_BUS_SERIAL3に変更してもピクリとも動きません。ボーレートを変更しても関係ないようです。Dynamixel 2.0のプロトコルに対応していないのか、XMシリーズが駄目なのかは謎です。
一旦RoboPlusでOpenCM9.04のファームウェアを修復後、RoboPlus 2.0 Managerで確認してみました。
まず、Dynamixel XM430-W350-R、OpenCM9.04-C、OpenCM 485拡張ボードを以下のように接続します。USBケーブルはPCと接続してください。
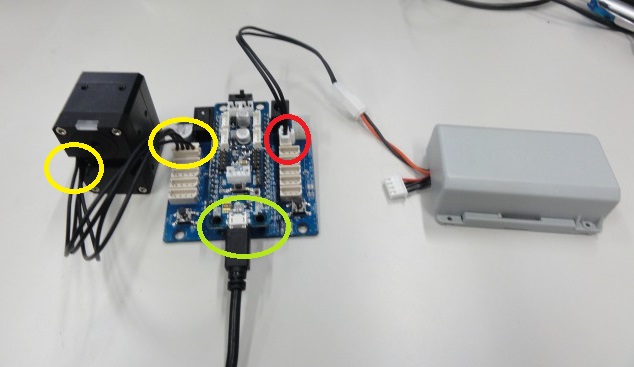
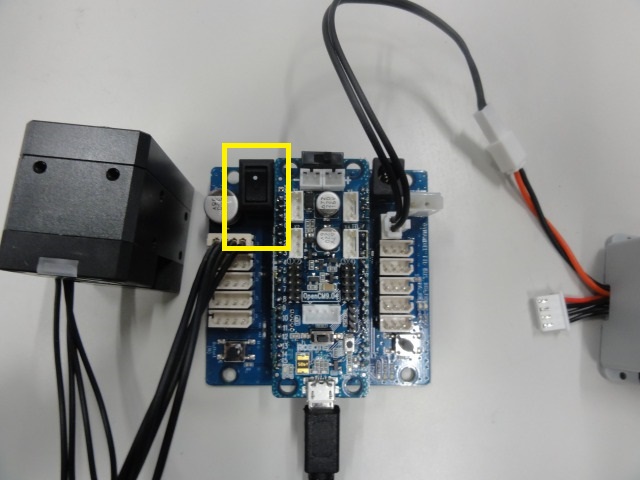
拡張ボードの電源は以下のスイッチでオンオフができます。
オンにするとXM430-W350-RのLEDが一回点滅します。
点滅しなかった場合はバッテリーが壊れている可能性があります。ちなみに画像に映っているバッテリーですが、一度も使っていないのに既に壊れています。
R+ Manager 2.0を起動後、アップデートするかどうか聞かれた場合はアップデートしてください。
アップデート後は、R+ Manager 2.0起動後に以下の画面が表示されます。
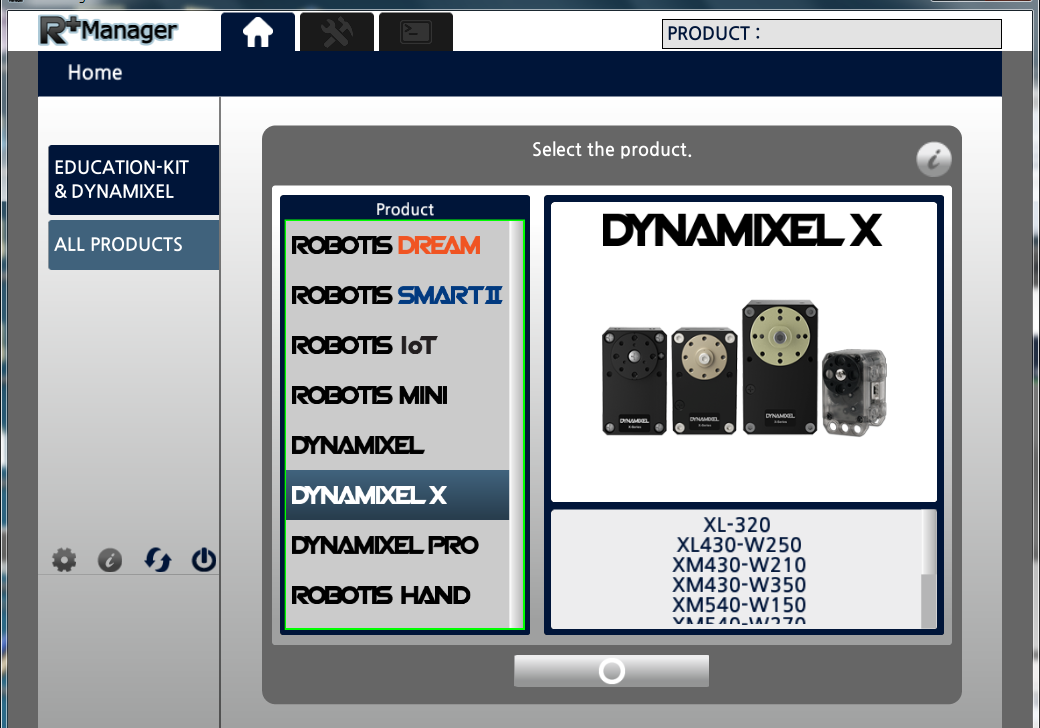
ProductからDYNAMIXEL Xを選んで○を押してください。
次に以下の画面でUpdate & Testを選んでください。
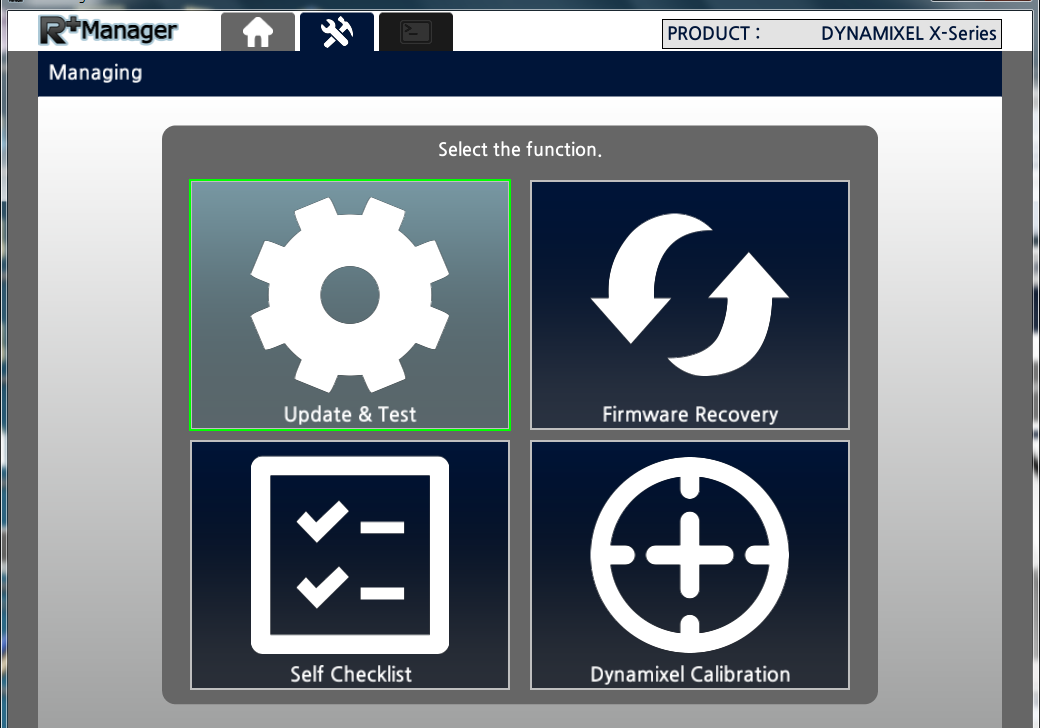
Nextを選んでいくとポート番号の選択画面に移行するため、適切なポートを選択してください。
OpenCM9.04-Cを直接接続した場合はROBOTIS Virtual COM Portと表示されるのでわかるとは思いますが、USBダウンローダーLN-101で接続するとUSB Serial Port(1.0)としか表示されないので分かり辛いかもしれません。
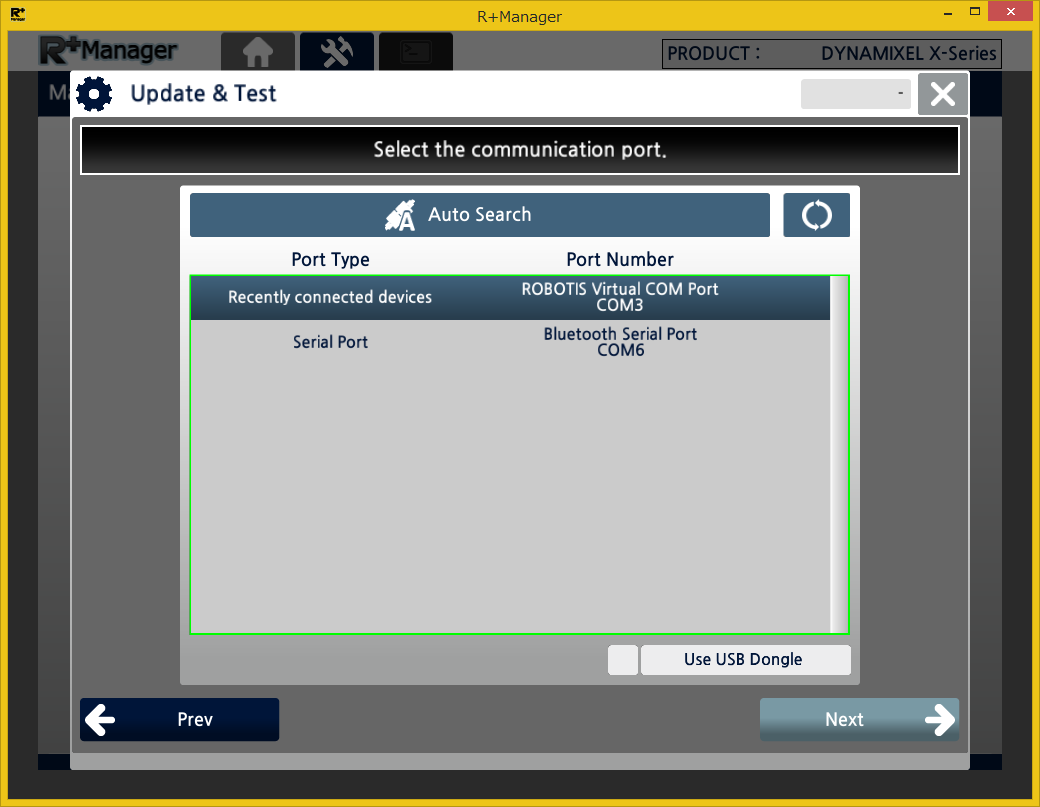
その後Nextを押していくとOpenCM9.04-Cと接続します。
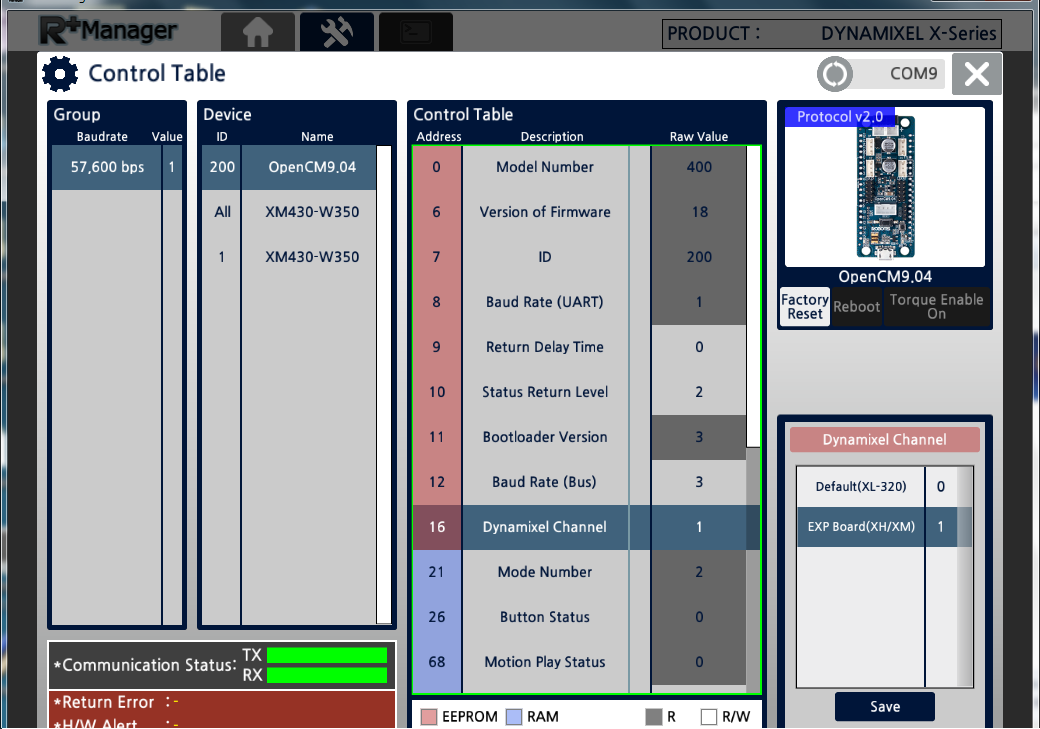
本来であればXM-430-W350も表示されるはずですが、設定を変更しないと表示されません。
Control Tableで、Dynamixel ChannelをEXP Board(XH/XM)に変更してください。
それからBand Rate (Bus)を57600bpsに変更してください。
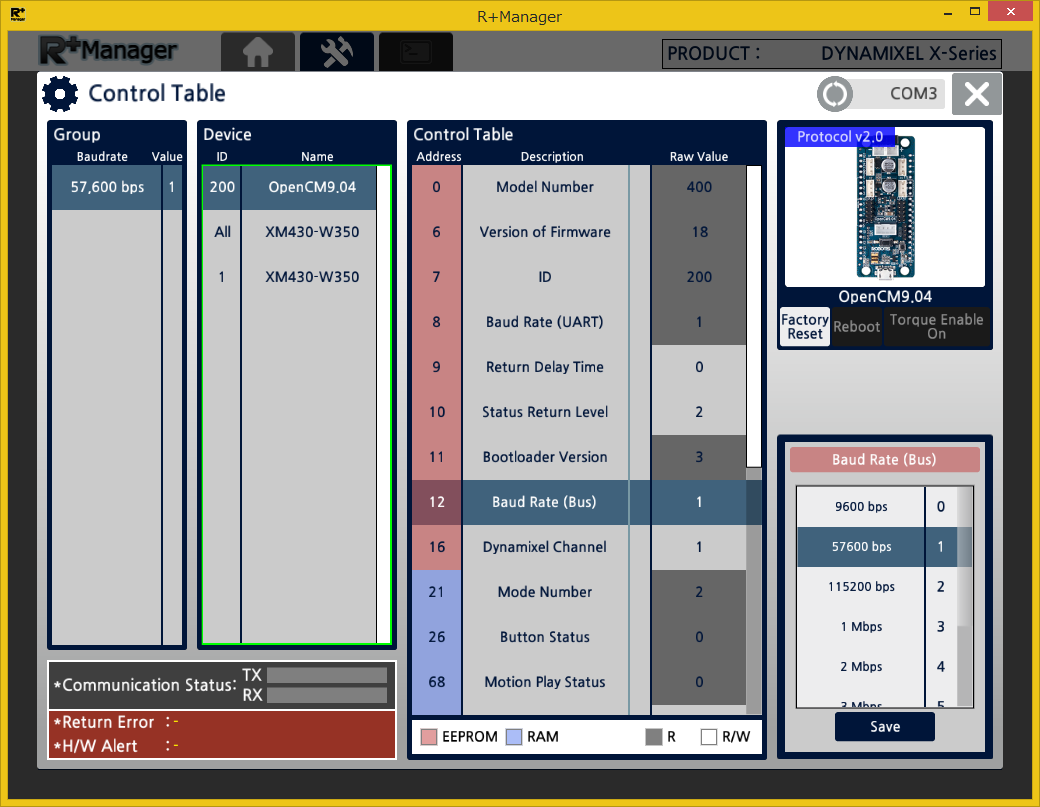
この後に、一旦Update & Testを×ボタンで終了後、OpenCM9.04-Cをリセット、OpenCM 485拡張ボードの電源を落として再起動、再度Update & TestによりOpenCM9.04-Cと接続すると、Device一覧にXM430-W350が表示されます。
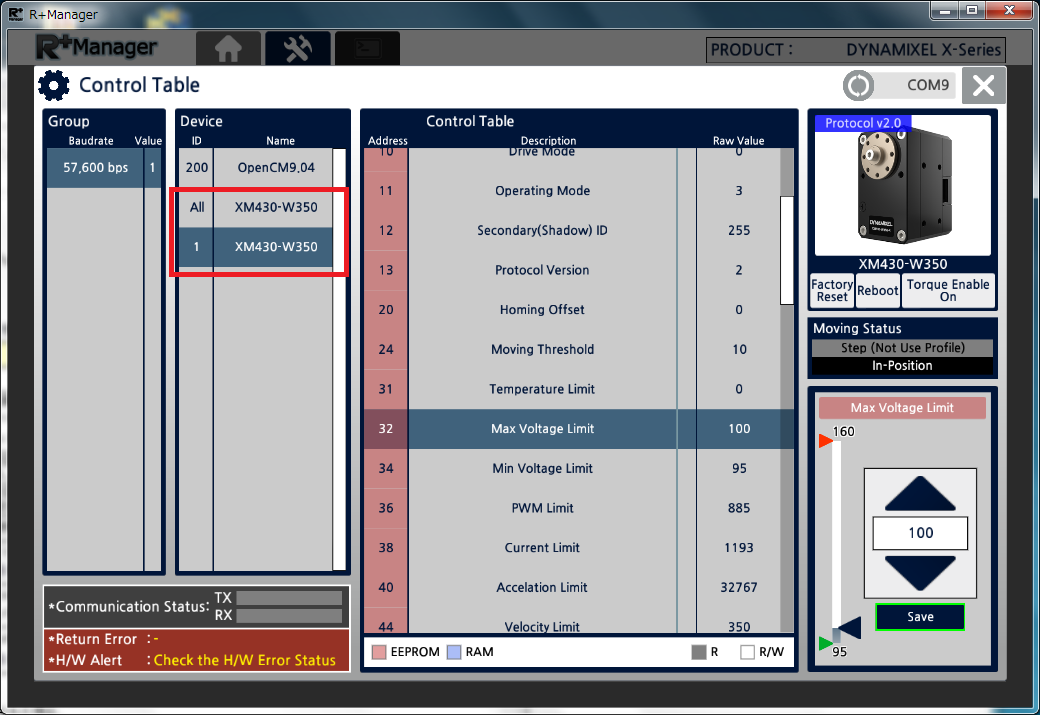
表示されない場合はOpenCM9.04-cのリセットボタンを押して再起動、拡張ボードの電源を入れ直すなどで接続できるかもしれません。
Control Table画面でXM430-W350-Rの状態を確認できます。
Torque EnableをONにした後、Goal Positionの値を操作することでモーターが動作します。

独自のプログラムでXM430-W350-Rを操作する場合は、Dynamixel Protocol 2 Libraryというライブラリがあるようなのでこれを使います。Dynamixel SDKというライブラリもあるようなのですが、XMシリーズが動くかどうかは不明です。libdynamixelは大丈夫みたいです。と言うかなんでこんなに乱立しているんだ。
とりあえず、CMake設定ファイルを以下のように作成します。ファイル名は適当に変更してください。
DXLTest.cppには、とりあえずライブラリを展開したフォルダのSampleCode\VC\smpl1(template).cの中身をコピーします。
ただ何故かエラーが出るので、DXDEVICEIDをTDeviceIDに変更します。
後は適当にモーターを操作するコードを追加します。
詳細については仕様を見ながら試すしかなさそうです。
そう考えるとlibdynamixel使った方が良かったかもしれません。
libdynamixelだと以下のようになります。
まあ別に何のライブラリを使っても性能的には大差はないだろうし、ライセンス次第な気もします。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
一本9800円も払うんだったら普通にラズパイ買うだろうし、謎です。この製品を貶したいのではなく、ただ純粋に疑問です。
それはさておき、Dynamixel XM430-W350-RをOpenCM9.04-C+OpenCM 485拡張ボードに接続して動作確認しようとしたのですが、かなり詰まる部分があったのでメモしておきます。
まず、OpenCM9.04を使うにあたりOpenCM IDEを使って動作確認しようとしたのですが、これが何故か上手くいきませんでした。サンプルコードのDXL_BUS_SERIAL1を拡張ボード用にDXL_BUS_SERIAL3に変更してもピクリとも動きません。ボーレートを変更しても関係ないようです。Dynamixel 2.0のプロトコルに対応していないのか、XMシリーズが駄目なのかは謎です。
一旦RoboPlusでOpenCM9.04のファームウェアを修復後、RoboPlus 2.0 Managerで確認してみました。
まず、Dynamixel XM430-W350-R、OpenCM9.04-C、OpenCM 485拡張ボードを以下のように接続します。USBケーブルはPCと接続してください。
拡張ボードの電源は以下のスイッチでオンオフができます。
オンにするとXM430-W350-RのLEDが一回点滅します。
点滅しなかった場合はバッテリーが壊れている可能性があります。ちなみに画像に映っているバッテリーですが、一度も使っていないのに既に壊れています。
R+ Manager 2.0を起動後、アップデートするかどうか聞かれた場合はアップデートしてください。
アップデート後は、R+ Manager 2.0起動後に以下の画面が表示されます。
ProductからDYNAMIXEL Xを選んで○を押してください。
次に以下の画面でUpdate & Testを選んでください。
Nextを選んでいくとポート番号の選択画面に移行するため、適切なポートを選択してください。
OpenCM9.04-Cを直接接続した場合はROBOTIS Virtual COM Portと表示されるのでわかるとは思いますが、USBダウンローダーLN-101で接続するとUSB Serial Port(1.0)としか表示されないので分かり辛いかもしれません。
その後Nextを押していくとOpenCM9.04-Cと接続します。
本来であればXM-430-W350も表示されるはずですが、設定を変更しないと表示されません。
Control Tableで、Dynamixel ChannelをEXP Board(XH/XM)に変更してください。
それからBand Rate (Bus)を57600bpsに変更してください。
この後に、一旦Update & Testを×ボタンで終了後、OpenCM9.04-Cをリセット、OpenCM 485拡張ボードの電源を落として再起動、再度Update & TestによりOpenCM9.04-Cと接続すると、Device一覧にXM430-W350が表示されます。
表示されない場合はOpenCM9.04-cのリセットボタンを押して再起動、拡張ボードの電源を入れ直すなどで接続できるかもしれません。
Control Table画面でXM430-W350-Rの状態を確認できます。
Torque EnableをONにした後、Goal Positionの値を操作することでモーターが動作します。
独自のプログラムでXM430-W350-Rを操作する場合は、Dynamixel Protocol 2 Libraryというライブラリがあるようなのでこれを使います。Dynamixel SDKというライブラリもあるようなのですが、XMシリーズが動くかどうかは不明です。libdynamixelは大丈夫みたいです。と言うかなんでこんなに乱立しているんだ。
とりあえず、CMake設定ファイルを以下のように作成します。ファイル名は適当に変更してください。
cmake_minimum_required(VERSION 2.8)
set(DX2LIB_ROOT ${DX2LIB_ROOT} CACHE PATH "set DX2LIB_ROOT ")
if(NOT DX2LIB_ROOT)
message(FATAL_ERROR "Please set DX2LIB_ROOT.")
endif()
project (DXLTest)
include_directories(${DX2LIB_ROOT})
link_directories(${DX2LIB_ROOT})
add_executable(DXLTest DXLTest.cpp)
target_link_libraries(DXLTest dx2lib_x32.lib)cmake_minimum_required(VERSION 2.8)
set(DX2LIB_ROOT ${DX2LIB_ROOT} CACHE PATH "set DX2LIB_ROOT ")
if(NOT DX2LIB_ROOT)
message(FATAL_ERROR "Please set DX2LIB_ROOT.")
endif()
project (DXLTest)
include_directories(${DX2LIB_ROOT})
link_directories(${DX2LIB_ROOT})
add_executable(DXLTest DXLTest.cpp)
target_link_libraries(DXLTest dx2lib_x32.lib)
DXLTest.cppには、とりあえずライブラリを展開したフォルダのSampleCode\VC\smpl1(template).cの中身をコピーします。
ただ何故かエラーが出るので、DXDEVICEIDをTDeviceIDに変更します。
DXDEVICEID dev;
⇒
TDeviceID dev;
後は適当にモーターを操作するコードを追加します。
TErrorCode err;
//トルクをオンにする
DX2_WriteByteData(dev, 1, 64, 1, &err);
Sleep(1000);
//90度の位置に回転
DX2_WriteLongData(dev, 1, 116, 3072, &err);
Sleep(1000);
//-90度の位置に回転
DX2_WriteLongData(dev, 1, 116, 1024, &err);
Sleep(1000);
//トルクをオフにする
DX2_WriteByteData(dev, 1, 64, 0, &err);
詳細については仕様を見ながら試すしかなさそうです。
そう考えるとlibdynamixel使った方が良かったかもしれません。
libdynamixelだと以下のようになります。
DynamixelV2 m("\\\\.\\COM3", 1000000));
m.TorqueEnable(1);
Sleep(1000);
m.MovePosition(1, 1024);
Sleep(1000);
m.MovePosition(1, 3072);
Sleep(1000);
m.TorqueDisable(1);
まあ別に何のライブラリを使っても性能的には大差はないだろうし、ライセンス次第な気もします。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
実は今までOpenRTM-erlangを使ったことがなかったため、使い方をメモしておきます。備忘録です。このブログは首相案件ではありません。
Windowsでも試してみたのですがコンポーネントプロファイルを取得しようとした途端に落ちるため、Ubuntuで動作確認します。
まあ落ちても即座に再起動するのですが、再試行しても無駄なようなので、Windowsでの動作はとりあえず諦めます。
Windowsだからなのか、Erlang/OTPのバージョンの問題なのかは不明です。
Ubuntu 16.04でErlang/OTPはaptでインストールできます。
$ sudo apt-get install erlang
そしてOpenRTM-erlangのビルドをしますが、Erlang/OTP 18からいろいろと変わったらしく、そのままではビルドできません。
修正したものを用意したので、フォークしたリポジトリからソースコードをダウンロードしてください、
後はコマンドでmakeすればebinフォルダにbeamファイルが生成されます。
サンプルを実行するには、exampleフォルダに移動後、以下のコマンドを実行してください。
$ erl -pa ../ebin
1> openrtm_erl:start(0,[]).
2> run_sample:run().
と言ってはみたものの、これが正しい使い方かは不明です。
これでTicker0.rtcとPrinter0.rtcが通信を開始しますが、ログメッセージが大量に表示されるためよく分かりません。
ログレベルを起動時に変更する方法は分からないので、defaults.erlのrtl_paranoidの部分をrtl_silentに変更するなどして対処してください。
RT System Editorからアクティブ化をしようとしたのですが、何故か失敗しています。
確かにErlangは使ってみると面白いプログラミング言語ではあるのですが、言語仕様が気に食わないというか、コードの記述方法が気持ち悪いです。
関数の途中に「,」が入ったり、関数の最後が「.」だったりと、なかなか馴染めそうにありません。
というか、関数でアロー演算子->を使う言語は嫌いです。MoonScriptも嫌いです。
アロー演算子ではなくて、全角の→を使えと思います。それはさすがに嘘ですけど。
標準でCORBAやFSMのライブラリが入っている言語って、Erlangだけなんだろうなあ。
(追記)
UbuntuでErlang/OTP 20を使って動作確認したのですが特に問題はなかったため、Windows上で動作させることが問題のようです。Erlang/OTPのバージョンは関係ありませんでした。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
Windowsでも試してみたのですがコンポーネントプロファイルを取得しようとした途端に落ちるため、Ubuntuで動作確認します。
まあ落ちても即座に再起動するのですが、再試行しても無駄なようなので、Windowsでの動作はとりあえず諦めます。
Windowsだからなのか、Erlang/OTPのバージョンの問題なのかは不明です。
Ubuntu 16.04でErlang/OTPはaptでインストールできます。
$ sudo apt-get install erlang
そしてOpenRTM-erlangのビルドをしますが、Erlang/OTP 18からいろいろと変わったらしく、そのままではビルドできません。
修正したものを用意したので、フォークしたリポジトリからソースコードをダウンロードしてください、
後はコマンドでmakeすればebinフォルダにbeamファイルが生成されます。
サンプルを実行するには、exampleフォルダに移動後、以下のコマンドを実行してください。
$ erl -pa ../ebin
1> openrtm_erl:start(0,[]).
2> run_sample:run().
と言ってはみたものの、これが正しい使い方かは不明です。
これでTicker0.rtcとPrinter0.rtcが通信を開始しますが、ログメッセージが大量に表示されるためよく分かりません。
ログレベルを起動時に変更する方法は分からないので、defaults.erlのrtl_paranoidの部分をrtl_silentに変更するなどして対処してください。
RT System Editorからアクティブ化をしようとしたのですが、何故か失敗しています。
確かにErlangは使ってみると面白いプログラミング言語ではあるのですが、言語仕様が気に食わないというか、コードの記述方法が気持ち悪いです。
関数の途中に「,」が入ったり、関数の最後が「.」だったりと、なかなか馴染めそうにありません。
というか、関数でアロー演算子->を使う言語は嫌いです。MoonScriptも嫌いです。
アロー演算子ではなくて、全角の→を使えと思います。それはさすがに嘘ですけど。
標準でCORBAやFSMのライブラリが入っている言語って、Erlangだけなんだろうなあ。
(追記)
UbuntuでErlang/OTP 20を使って動作確認したのですが特に問題はなかったため、Windows上で動作させることが問題のようです。Erlang/OTPのバージョンは関係ありませんでした。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
今回はあの超人気プログラミング言語MoonScriptでRTCを作成します。
とは言ってみたものの、おそらくほとんどの人は知らないと思うので軽く説明します。
MoonScriptはLuaのトランスレータ言語です。
MoonScriptで記述したコードは、Luaに変換後に実行されます。
Luaは言語仕様を極力削減しているため軽量という特徴がありますが、クラスのようなものを定義するにはテーブルを駆使してトリッキーなコードを書く必要があります。
このためほかのプログラミング言語とは大きく違うコーディングを強いられるため可読性が悪いという難点があります。
MoonScriptを使えば、以下のように自然にクラスを定義できます。
MoonScriptでRTCを作成すると、以下のようなコードを書くことになります。
おまけですが、OpenResty上でRTCを動かした動画をあげておきました。
今まではWEBブラウザ上でRTCの情報を表示したい場合は、WEBサーバーとRTCは別々に起動して何かしらの通信を行う必要があったのですが、これで多少実装が楽になるのではないでしょうか?
RTSystem Editor on the WEB等のツールは作りやすくなりそうです。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
とは言ってみたものの、おそらくほとんどの人は知らないと思うので軽く説明します。
MoonScriptはLuaのトランスレータ言語です。
MoonScriptで記述したコードは、Luaに変換後に実行されます。
Luaは言語仕様を極力削減しているため軽量という特徴がありますが、クラスのようなものを定義するにはテーブルを駆使してトリッキーなコードを書く必要があります。
このためほかのプログラミング言語とは大きく違うコーディングを強いられるため可読性が悪いという難点があります。
MoonScriptを使えば、以下のように自然にクラスを定義できます。
class BaseClass
new: (v1) =>
self.v1 = v1
print_func: =>
print(self.v1)
class SubClass extends BaseClass
new: (v1,v2) =>
super v1
self.v2 = v2
print_func: =>
super!
self.v2 += 1
print(self.v2)
test_func = (bc) ->
bc\print_func!
obj = SubClass(1,2)
test_func(obj)
test_func(obj)
test_func(obj)
MoonScriptでRTCを作成すると、以下のようなコードを書くことになります。
---------------------------------
--! @file ConsoleIn.moon
--! @brief アウトポート出力のRTCサンプル
---------------------------------
openrtm_ms = require "openrtm_ms"
-- RTCの仕様をテーブルで定義する
consolein_spec = {
["implementation_id"]:"ConsoleIn",
["type_name"]:"ConsoleIn",
["description"]:"Console input component",
["version"]:"1.0",
["vendor"]:"Nobuhiko Miyamoto",
["category"]:"example",
["activity_type"]:"DataFlowComponent",
["max_instance"]:"10",
["language"]:"MoonScript",
["lang_type"]:"script"}
-- @class ConfigSample
class ConsoleIn extends openrtm_ms.RTObject
-- コンストラクタ
-- @param manager マネージャ
new: (manager) =>
super manager
-- データ格納変数
self._d_out = openrtm_ms.RTCUtil.instantiateDataType("::RTC::TimedLong")
-- アウトポート生成
self._outOut = openrtm_ms.OutPort("out",self._d_out,"::RTC::TimedLong")
-- 初期化時のコールバック関数
-- @return リターンコード
onInitialize: =>
-- ポート追加
@addOutPort("out",self._outOut)
return self._ReturnCode_t.RTC_OK
-- アクティブ状態の時の実行関数
-- @param ec_id 実行コンテキストのID
-- @return リターンコード
onExecute: (ec_id) =>
io.write("Please input number: ")
data = tonumber(io.read())
-- 出力データ格納
self._d_out.data = data
-- 出力データにタイムスタンプ設定
openrtm_ms.setTimestamp(self._d_out)
-- データ書き込み
self._outOut\write()
return self._ReturnCode_t.RTC_OK
-- ConsoleInコンポーネントの生成ファクトリ登録関数
-- @param manager マネージャ
ConsoleInInit = (manager) ->
prof = openrtm_ms.Properties({defaults_map:consolein_spec})
manager\registerFactory(prof, ConsoleIn, openrtm_ms.Factory.Delete)
-- ConsoleInコンポーネント生成
-- @param manager マネージャ
MyModuleInit = (manager) ->
ConsoleInInit(manager)
comp = manager\createComponent("ConsoleIn")
-- ConsoleIn.luaを直接実行している場合はマネージャの起動を行う
-- ロードして実行している場合はテーブルを返す
--if openrtm_ms.Manager.is_main()
-- manager = openrtm_ms.Manager
-- manager\init(arg)
-- manager\setModuleInitProc(MyModuleInit)
-- manager\activateManager()
-- manager\runManager()
--else
-- obj = {}
-- obj.Init = ConsoleInInit
-- return obj
manager = openrtm_ms.Manager
manager\init(arg)
manager\setModuleInitProc(MyModuleInit)
manager\activateManager()
manager\runManager()
おまけですが、OpenResty上でRTCを動かした動画をあげておきました。
今まではWEBブラウザ上でRTCの情報を表示したい場合は、WEBサーバーとRTCは別々に起動して何かしらの通信を行う必要があったのですが、これで多少実装が楽になるのではないでしょうか?
RTSystem Editor on the WEB等のツールは作りやすくなりそうです。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
OpenRTM Lua版 ver.0.2をリリースしました。
RTCのコーディング方法について変更したため、0.1で動作していたRTCは動作できなくなりましたが、特に影響はなさそうなので気にしないようにします。
RTC BuilderでLuaのコードも出せるようになるはずでしたが、OpenRTM-aist 1.2が何故かまだリリースされていないため、1からコードを書くしかありません。
実行時間、起動時間等について実験してみましたが、Luaの場合は地味に起動が遅いです。
ちなみにマスターマネージャが未起動の状態だとさらに遅くなります。
LuaRocksへの対応したため、インストールは簡単になったはずです。
RTMかROSのどちらを使うべきか、比較してどうか、という話はごく稀に聞きますが、はっきり言ってロボット屋さんだったらROSを使ったほうがいいです。
モジュールの数が桁違いですし、Linuxを使うというハードルが超えられるかが問題です。
僕みたいにLinuxが宗教的な理由で使えないとか、あるいは規格化したものでないと使えないとかであれば、RTMを使うのも選択肢に入るかもしれません。
ロボット用ミドルウェアとしてRTMがROSをユーザー数で上回るのは今更無謀だろうし、ロボット屋さん以外がロボット関連技術を使えるようにする方向のほうが正しいかもしれません。
過去にはメディアアートやゲームにRTMを活用する試みもありましたが、あれは方向性は正しかったと思います。
というわけで、OpenRTM Lua版もLÖVEやAviUtlのようなロボットとは関係ないようなソフトウェアに組み込んで使ってみたサンプルを増やす方向で考えたいと思います。
ただ、何もなければver.0.3は8月ぐらいまではリリースしないので、しばらく更新は滞ります。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
RTCのコーディング方法について変更したため、0.1で動作していたRTCは動作できなくなりましたが、特に影響はなさそうなので気にしないようにします。
RTC BuilderでLuaのコードも出せるようになるはずでしたが、OpenRTM-aist 1.2が何故かまだリリースされていないため、1からコードを書くしかありません。
実行時間、起動時間等について実験してみましたが、Luaの場合は地味に起動が遅いです。
ちなみにマスターマネージャが未起動の状態だとさらに遅くなります。
LuaRocksへの対応したため、インストールは簡単になったはずです。
RTMかROSのどちらを使うべきか、比較してどうか、という話はごく稀に聞きますが、はっきり言ってロボット屋さんだったらROSを使ったほうがいいです。
モジュールの数が桁違いですし、Linuxを使うというハードルが超えられるかが問題です。
僕みたいにLinuxが宗教的な理由で使えないとか、あるいは規格化したものでないと使えないとかであれば、RTMを使うのも選択肢に入るかもしれません。
ロボット用ミドルウェアとしてRTMがROSをユーザー数で上回るのは今更無謀だろうし、ロボット屋さん以外がロボット関連技術を使えるようにする方向のほうが正しいかもしれません。
過去にはメディアアートやゲームにRTMを活用する試みもありましたが、あれは方向性は正しかったと思います。
というわけで、OpenRTM Lua版もLÖVEやAviUtlのようなロボットとは関係ないようなソフトウェアに組み込んで使ってみたサンプルを増やす方向で考えたいと思います。
ただ、何もなければver.0.3は8月ぐらいまではリリースしないので、しばらく更新は滞ります。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・