ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
USBラズパイなるものが発売されるらしいけど、一体ラズパイエミュレータと比べて何の利点があるのだろう・・・
一本9800円も払うんだったら普通にラズパイ買うだろうし、謎です。この製品を貶したいのではなく、ただ純粋に疑問です。
それはさておき、Dynamixel XM430-W350-RをOpenCM9.04-C+OpenCM 485拡張ボードに接続して動作確認しようとしたのですが、かなり詰まる部分があったのでメモしておきます。
まず、OpenCM9.04を使うにあたりOpenCM IDEを使って動作確認しようとしたのですが、これが何故か上手くいきませんでした。サンプルコードのDXL_BUS_SERIAL1を拡張ボード用にDXL_BUS_SERIAL3に変更してもピクリとも動きません。ボーレートを変更しても関係ないようです。Dynamixel 2.0のプロトコルに対応していないのか、XMシリーズが駄目なのかは謎です。
一旦RoboPlusでOpenCM9.04のファームウェアを修復後、RoboPlus 2.0 Managerで確認してみました。
まず、Dynamixel XM430-W350-R、OpenCM9.04-C、OpenCM 485拡張ボードを以下のように接続します。USBケーブルはPCと接続してください。
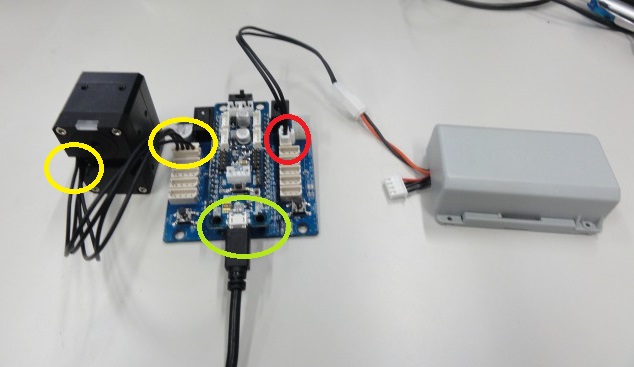
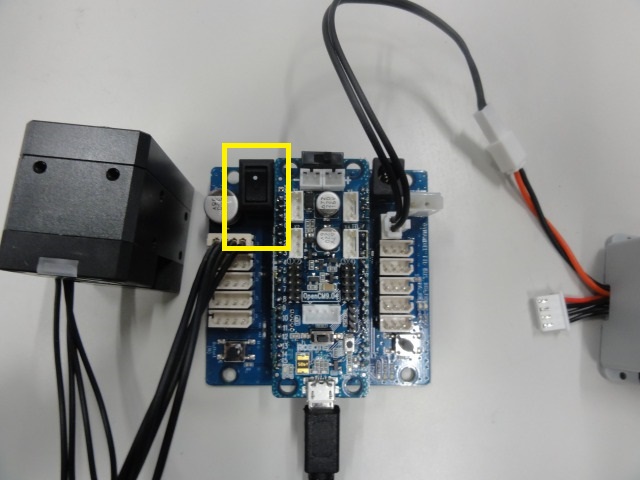
拡張ボードの電源は以下のスイッチでオンオフができます。
オンにするとXM430-W350-RのLEDが一回点滅します。
点滅しなかった場合はバッテリーが壊れている可能性があります。ちなみに画像に映っているバッテリーですが、一度も使っていないのに既に壊れています。
R+ Manager 2.0を起動後、アップデートするかどうか聞かれた場合はアップデートしてください。
アップデート後は、R+ Manager 2.0起動後に以下の画面が表示されます。
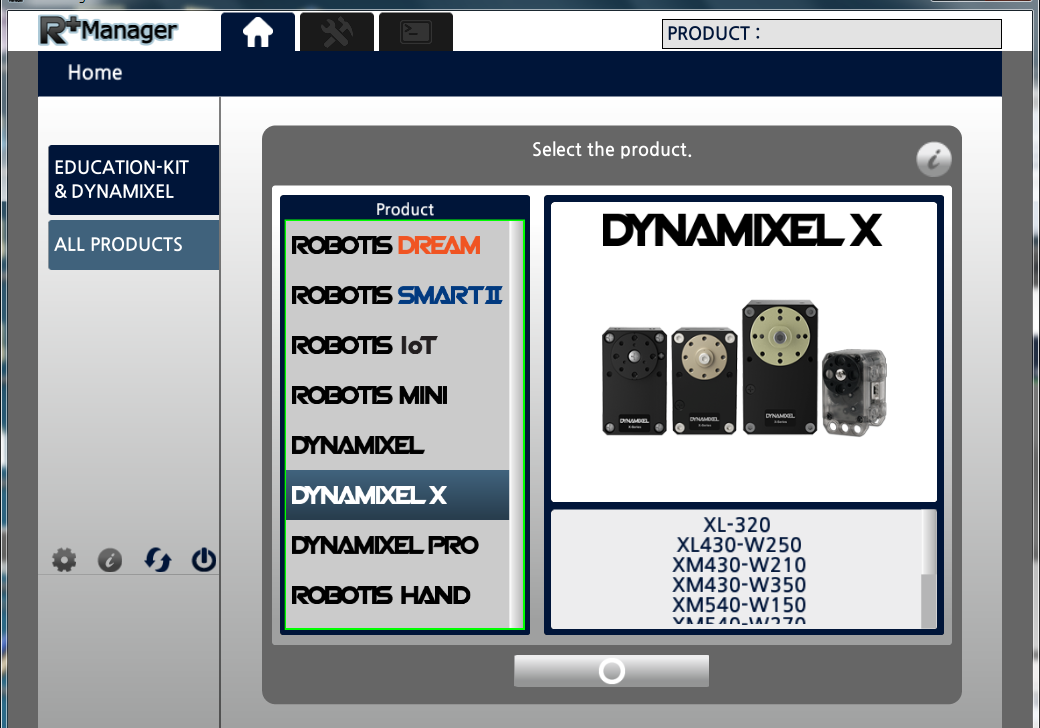
ProductからDYNAMIXEL Xを選んで○を押してください。
次に以下の画面でUpdate & Testを選んでください。
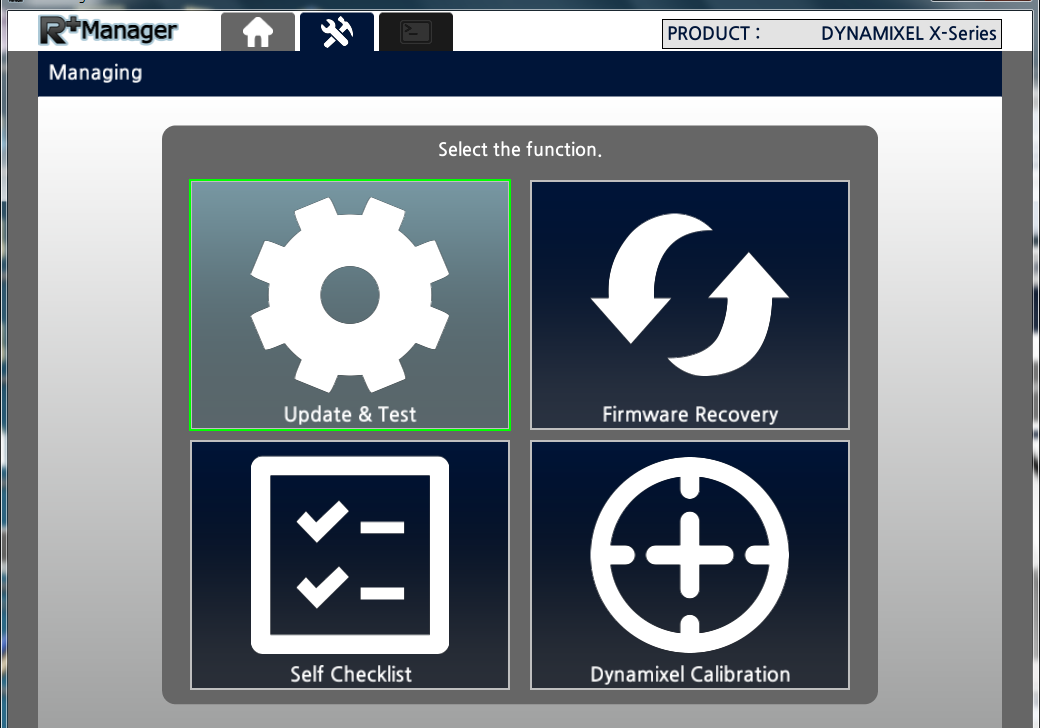
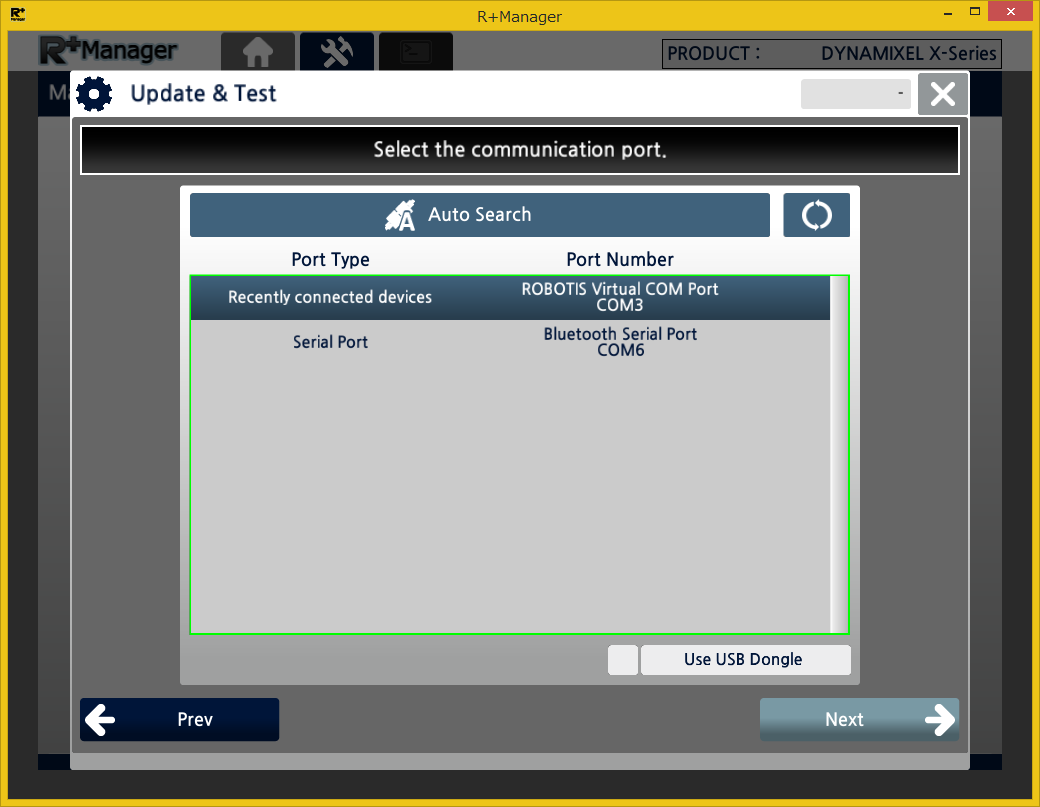
Nextを選んでいくとポート番号の選択画面に移行するため、適切なポートを選択してください。
OpenCM9.04-Cを直接接続した場合はROBOTIS Virtual COM Portと表示されるのでわかるとは思いますが、USBダウンローダーLN-101で接続するとUSB Serial Port(1.0)としか表示されないので分かり辛いかもしれません。
その後Nextを押していくとOpenCM9.04-Cと接続します。
本来であればXM-430-W350も表示されるはずですが、設定を変更しないと表示されません。
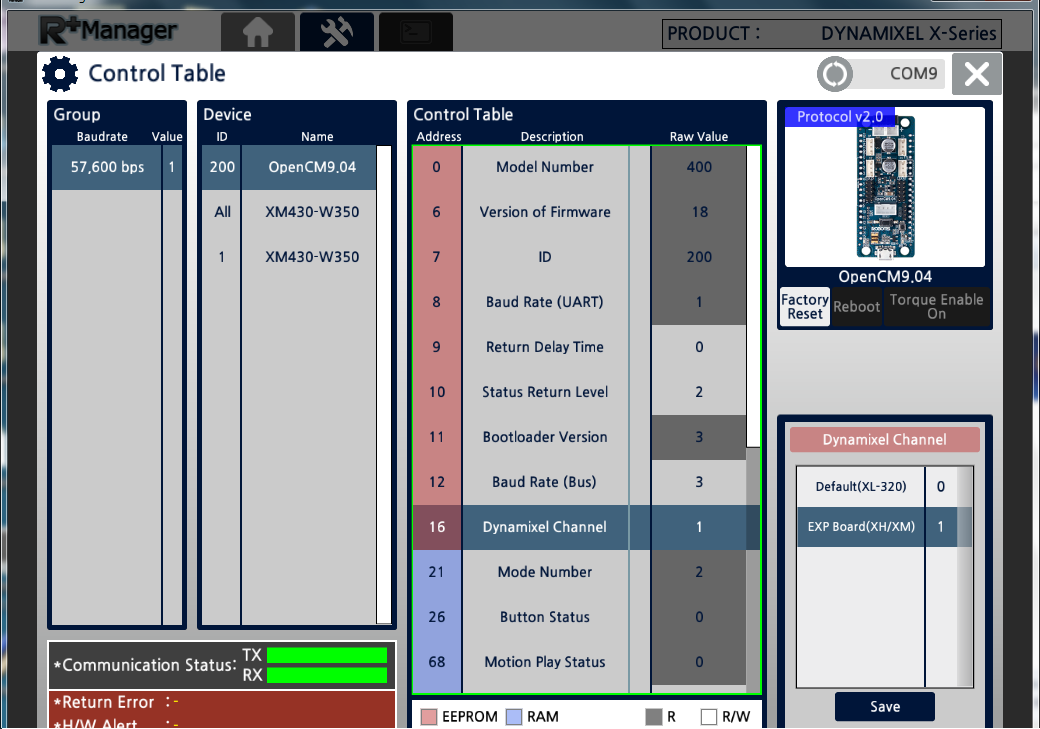
Control Tableで、Dynamixel ChannelをEXP Board(XH/XM)に変更してください。
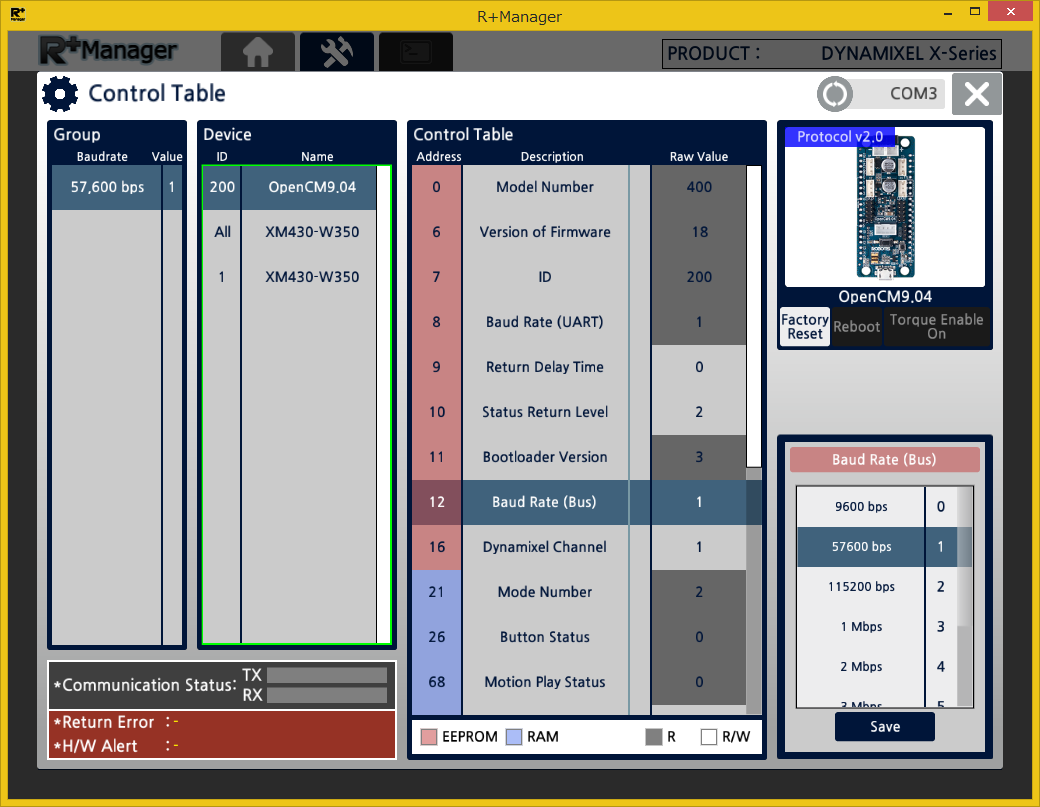
それからBand Rate (Bus)を57600bpsに変更してください。
この後に、一旦Update & Testを×ボタンで終了後、OpenCM9.04-Cをリセット、OpenCM 485拡張ボードの電源を落として再起動、再度Update & TestによりOpenCM9.04-Cと接続すると、Device一覧にXM430-W350が表示されます。
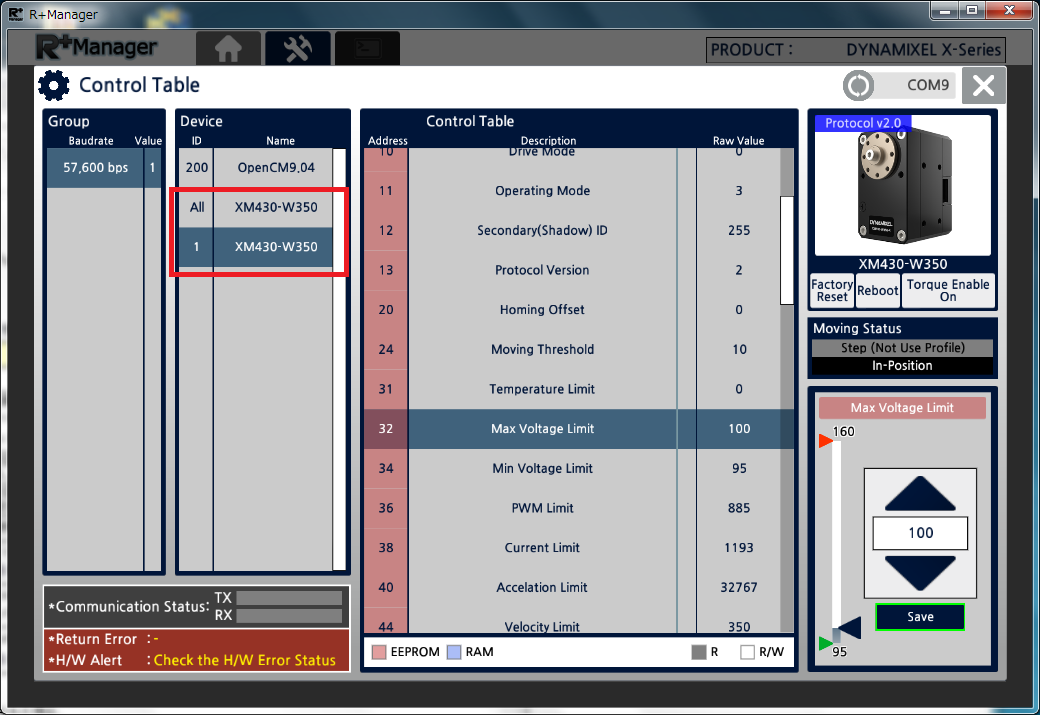
表示されない場合はOpenCM9.04-cのリセットボタンを押して再起動、拡張ボードの電源を入れ直すなどで接続できるかもしれません。
Control Table画面でXM430-W350-Rの状態を確認できます。
Torque EnableをONにした後、Goal Positionの値を操作することでモーターが動作します。

独自のプログラムでXM430-W350-Rを操作する場合は、Dynamixel Protocol 2 Libraryというライブラリがあるようなのでこれを使います。Dynamixel SDKというライブラリもあるようなのですが、XMシリーズが動くかどうかは不明です。libdynamixelは大丈夫みたいです。と言うかなんでこんなに乱立しているんだ。
とりあえず、CMake設定ファイルを以下のように作成します。ファイル名は適当に変更してください。
DXLTest.cppには、とりあえずライブラリを展開したフォルダのSampleCode\VC\smpl1(template).cの中身をコピーします。
ただ何故かエラーが出るので、DXDEVICEIDをTDeviceIDに変更します。
後は適当にモーターを操作するコードを追加します。
詳細については仕様を見ながら試すしかなさそうです。
そう考えるとlibdynamixel使った方が良かったかもしれません。
libdynamixelだと以下のようになります。
まあ別に何のライブラリを使っても性能的には大差はないだろうし、ライセンス次第な気もします。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

一本9800円も払うんだったら普通にラズパイ買うだろうし、謎です。この製品を貶したいのではなく、ただ純粋に疑問です。
それはさておき、Dynamixel XM430-W350-RをOpenCM9.04-C+OpenCM 485拡張ボードに接続して動作確認しようとしたのですが、かなり詰まる部分があったのでメモしておきます。
まず、OpenCM9.04を使うにあたりOpenCM IDEを使って動作確認しようとしたのですが、これが何故か上手くいきませんでした。サンプルコードのDXL_BUS_SERIAL1を拡張ボード用にDXL_BUS_SERIAL3に変更してもピクリとも動きません。ボーレートを変更しても関係ないようです。Dynamixel 2.0のプロトコルに対応していないのか、XMシリーズが駄目なのかは謎です。
一旦RoboPlusでOpenCM9.04のファームウェアを修復後、RoboPlus 2.0 Managerで確認してみました。
まず、Dynamixel XM430-W350-R、OpenCM9.04-C、OpenCM 485拡張ボードを以下のように接続します。USBケーブルはPCと接続してください。
拡張ボードの電源は以下のスイッチでオンオフができます。
オンにするとXM430-W350-RのLEDが一回点滅します。
点滅しなかった場合はバッテリーが壊れている可能性があります。ちなみに画像に映っているバッテリーですが、一度も使っていないのに既に壊れています。
R+ Manager 2.0を起動後、アップデートするかどうか聞かれた場合はアップデートしてください。
アップデート後は、R+ Manager 2.0起動後に以下の画面が表示されます。
ProductからDYNAMIXEL Xを選んで○を押してください。
次に以下の画面でUpdate & Testを選んでください。
Nextを選んでいくとポート番号の選択画面に移行するため、適切なポートを選択してください。
OpenCM9.04-Cを直接接続した場合はROBOTIS Virtual COM Portと表示されるのでわかるとは思いますが、USBダウンローダーLN-101で接続するとUSB Serial Port(1.0)としか表示されないので分かり辛いかもしれません。
その後Nextを押していくとOpenCM9.04-Cと接続します。
本来であればXM-430-W350も表示されるはずですが、設定を変更しないと表示されません。
Control Tableで、Dynamixel ChannelをEXP Board(XH/XM)に変更してください。
それからBand Rate (Bus)を57600bpsに変更してください。
この後に、一旦Update & Testを×ボタンで終了後、OpenCM9.04-Cをリセット、OpenCM 485拡張ボードの電源を落として再起動、再度Update & TestによりOpenCM9.04-Cと接続すると、Device一覧にXM430-W350が表示されます。
表示されない場合はOpenCM9.04-cのリセットボタンを押して再起動、拡張ボードの電源を入れ直すなどで接続できるかもしれません。
Control Table画面でXM430-W350-Rの状態を確認できます。
Torque EnableをONにした後、Goal Positionの値を操作することでモーターが動作します。
独自のプログラムでXM430-W350-Rを操作する場合は、Dynamixel Protocol 2 Libraryというライブラリがあるようなのでこれを使います。Dynamixel SDKというライブラリもあるようなのですが、XMシリーズが動くかどうかは不明です。libdynamixelは大丈夫みたいです。と言うかなんでこんなに乱立しているんだ。
とりあえず、CMake設定ファイルを以下のように作成します。ファイル名は適当に変更してください。
cmake_minimum_required(VERSION 2.8)
set(DX2LIB_ROOT ${DX2LIB_ROOT} CACHE PATH "set DX2LIB_ROOT ")
if(NOT DX2LIB_ROOT)
message(FATAL_ERROR "Please set DX2LIB_ROOT.")
endif()
project (DXLTest)
include_directories(${DX2LIB_ROOT})
link_directories(${DX2LIB_ROOT})
add_executable(DXLTest DXLTest.cpp)
target_link_libraries(DXLTest dx2lib_x32.lib)cmake_minimum_required(VERSION 2.8)
set(DX2LIB_ROOT ${DX2LIB_ROOT} CACHE PATH "set DX2LIB_ROOT ")
if(NOT DX2LIB_ROOT)
message(FATAL_ERROR "Please set DX2LIB_ROOT.")
endif()
project (DXLTest)
include_directories(${DX2LIB_ROOT})
link_directories(${DX2LIB_ROOT})
add_executable(DXLTest DXLTest.cpp)
target_link_libraries(DXLTest dx2lib_x32.lib)
DXLTest.cppには、とりあえずライブラリを展開したフォルダのSampleCode\VC\smpl1(template).cの中身をコピーします。
ただ何故かエラーが出るので、DXDEVICEIDをTDeviceIDに変更します。
DXDEVICEID dev;
⇒
TDeviceID dev;
後は適当にモーターを操作するコードを追加します。
TErrorCode err;
//トルクをオンにする
DX2_WriteByteData(dev, 1, 64, 1, &err);
Sleep(1000);
//90度の位置に回転
DX2_WriteLongData(dev, 1, 116, 3072, &err);
Sleep(1000);
//-90度の位置に回転
DX2_WriteLongData(dev, 1, 116, 1024, &err);
Sleep(1000);
//トルクをオフにする
DX2_WriteByteData(dev, 1, 64, 0, &err);
詳細については仕様を見ながら試すしかなさそうです。
そう考えるとlibdynamixel使った方が良かったかもしれません。
libdynamixelだと以下のようになります。
DynamixelV2 m("\\\\.\\COM3", 1000000));
m.TorqueEnable(1);
Sleep(1000);
m.MovePosition(1, 1024);
Sleep(1000);
m.MovePosition(1, 3072);
Sleep(1000);
m.TorqueDisable(1);
まあ別に何のライブラリを使っても性能的には大差はないだろうし、ライセンス次第な気もします。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする