ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
Edison Kit for Arduinoを買いました。
買ってとりあえずOpenRTM-aist-Pythonをインストールしてみたのですが、色々と手こずりました。
まずEdisonをArdiunoボードに取り付けるときに意外に力を入れないと取り付けられませんでした。いやそこかよって感じですがね。
reboot otaとコマンドを打ってファームウェアアップデートをしたつもりだったのですが、何故か1回やっただけではアップデートされていませんでした。それでアップデートできていたと思っていたので先頭の文字が入力できないなあとか不思議に思いながら数時間作業していました。今考えると相当マヌケだなあ。cat /etc/versionで確認して見るとアップデートできてないやんけと気づいて、もう一回reboot otaと入力するとアップデートできていました。Pythonでプログラム作ろうとしてmraaがないとかエラーが出ていたのですが、アップデートするとちゃんとインポートできていました。いやでもアップデート前にどっかのディレクトリにmraaはあったような気がするのですが、終わった事なので気にしない事にします。
それからやたらとインストールしなければならないものが多い。ドライバとかドライバとかドライバとか。
とりあえずPCには以下のソフトウェアをインストールしてください。
FTDI CDMドライバー
Intel Edisonドライバー
Tera Term(PuTTY等でも可)
それからUSB-microBケーブルでEdisonのJ16と接続後、Edisonに以下のファイルを解凍してYocto Linuxをインストールします。
Edison Yocto
そしてJ3に差し替えてTera Termでシリアル接続してください。
まずは先ほどのようにreboot otaと入力してください。必ずcat /etc/versionで最新版かどうか確認してください。次にconfigure_edison --setupで各種設定をしてください。
SSHで接続したいのでIPアドレスを調べます。ifconfigでIPアドレスを調べてください。
そして問題のomniORB、omniORBpy、OpenRTM-aist-Pythonのインストールをやります。
とりあえずomniORB-4.1.7.tar.bz2、omniORBpy-3.7.tar.bz2、OpenRTM-aist-Python-1.1.0-RC1.tar.gzをscpでEdisonにコピーして解凍しておいてください。
まずは解凍したomniORBのフォルダに移動して以下のコマンドを入力してください。
mkdir build
cd build
../configure
make
make install
数十分かかると思います。
次にomniORBpyのフォルダに移動して同じコマンドを入力します。
最後にOpenRTM-aist-Pythonのフォルダに移動して以下のコマンドを入力します。
python setup.py build
sudo python setup.py install
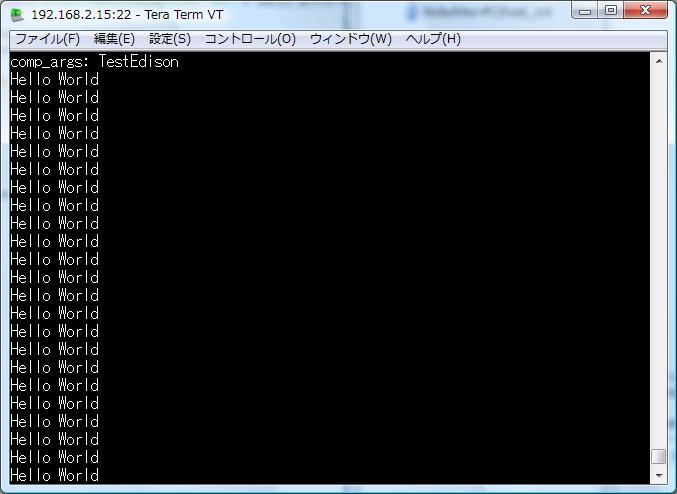
これで動作確認しようとテスト用のRTCを起動しようとするのですが、何故かomniORBというモジュールはないとかとエラーが出ます。
何故かと思って調べてみると、OpenRTM-aist-Pythonがインストールされたのは/usr/lib/python2.7/site-packagesで、omniORBがインストールされているのは/usr/local/lib/python2.7/site-packagesとなっていました。ひょっとしてConfigureのオプションで設定できたのかとも思いましたがよくわからないので
export PYTHONPATH=$PYTHONPATH:/usr/local/lib/python2.7/site-packages
としてパスを通しました。詳しい人は教えてください。
後は以下の内容のrtc.confを用意してコピーします。
とりあえずテスト用RTCはこれを使いました。
そして起動してRTシステムエディタでアクティブにすると動作している事が確認できます。
ソースコードを見てもらえれば分かると思いますが、LEDを点滅させています。面倒なのでその様子は載せませんけど。
Edisonを終了するときはshutdown -h nowと入力してください。いきなり電源を引っこ抜いたりはしない方が良いとからしいです。
多分C++版でも動作可能だと思うので、誰か実験してください。
できればクロスコンパイルの方法まで説明して頂けるとありがたいです。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

買ってとりあえずOpenRTM-aist-Pythonをインストールしてみたのですが、色々と手こずりました。
まずEdisonをArdiunoボードに取り付けるときに意外に力を入れないと取り付けられませんでした。いやそこかよって感じですがね。
reboot otaとコマンドを打ってファームウェアアップデートをしたつもりだったのですが、何故か1回やっただけではアップデートされていませんでした。それでアップデートできていたと思っていたので先頭の文字が入力できないなあとか不思議に思いながら数時間作業していました。今考えると相当マヌケだなあ。cat /etc/versionで確認して見るとアップデートできてないやんけと気づいて、もう一回reboot otaと入力するとアップデートできていました。Pythonでプログラム作ろうとしてmraaがないとかエラーが出ていたのですが、アップデートするとちゃんとインポートできていました。いやでもアップデート前にどっかのディレクトリにmraaはあったような気がするのですが、終わった事なので気にしない事にします。
それからやたらとインストールしなければならないものが多い。ドライバとかドライバとかドライバとか。
とりあえずPCには以下のソフトウェアをインストールしてください。
FTDI CDMドライバー
Intel Edisonドライバー
Tera Term(PuTTY等でも可)
それからUSB-microBケーブルでEdisonのJ16と接続後、Edisonに以下のファイルを解凍してYocto Linuxをインストールします。
Edison Yocto
そしてJ3に差し替えてTera Termでシリアル接続してください。
まずは先ほどのようにreboot otaと入力してください。必ずcat /etc/versionで最新版かどうか確認してください。次にconfigure_edison --setupで各種設定をしてください。
SSHで接続したいのでIPアドレスを調べます。ifconfigでIPアドレスを調べてください。
そして問題のomniORB、omniORBpy、OpenRTM-aist-Pythonのインストールをやります。
とりあえずomniORB-4.1.7.tar.bz2、omniORBpy-3.7.tar.bz2、OpenRTM-aist-Python-1.1.0-RC1.tar.gzをscpでEdisonにコピーして解凍しておいてください。
まずは解凍したomniORBのフォルダに移動して以下のコマンドを入力してください。
mkdir build
cd build
../configure
make
make install
数十分かかると思います。
次にomniORBpyのフォルダに移動して同じコマンドを入力します。
最後にOpenRTM-aist-Pythonのフォルダに移動して以下のコマンドを入力します。
python setup.py build
sudo python setup.py install
これで動作確認しようとテスト用のRTCを起動しようとするのですが、何故かomniORBというモジュールはないとかとエラーが出ます。
何故かと思って調べてみると、OpenRTM-aist-Pythonがインストールされたのは/usr/lib/python2.7/site-packagesで、omniORBがインストールされているのは/usr/local/lib/python2.7/site-packagesとなっていました。ひょっとしてConfigureのオプションで設定できたのかとも思いましたがよくわからないので
export PYTHONPATH=$PYTHONPATH:/usr/local/lib/python2.7/site-packages
としてパスを通しました。詳しい人は教えてください。
後は以下の内容のrtc.confを用意してコピーします。
corba.nameservers: IPアドレス
exec_cxt.periodic.rate: 1
IPアドレスはネームサーバーを起動しているPCのものを記述しておいてください。とりあえずテスト用RTCはこれを使いました。
そして起動してRTシステムエディタでアクティブにすると動作している事が確認できます。
ソースコードを見てもらえれば分かると思いますが、LEDを点滅させています。面倒なのでその様子は載せませんけど。
Edisonを終了するときはshutdown -h nowと入力してください。いきなり電源を引っこ抜いたりはしない方が良いとからしいです。
多分C++版でも動作可能だと思うので、誰か実験してください。
できればクロスコンパイルの方法まで説明して頂けるとありがたいです。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする