ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
rtc.confを変更したりするのが何かめんどくさい。
と言うか僕ぐらい記憶力が悪いと何の設定項目があったかを忘れます。
なのでGUI上の操作で簡単にできないかと思い、以下のソフトウェアを作りました。
単純にGUIで操作できるようにしただけなのであまり楽にはなってないかもしれないです。
ちなみにここからダウンロードできます。
動作にはPyQt4が必要です。
起動して最初の状態では以下のようになっていると思います。
とりあえずNewを選んで新規作成してください。

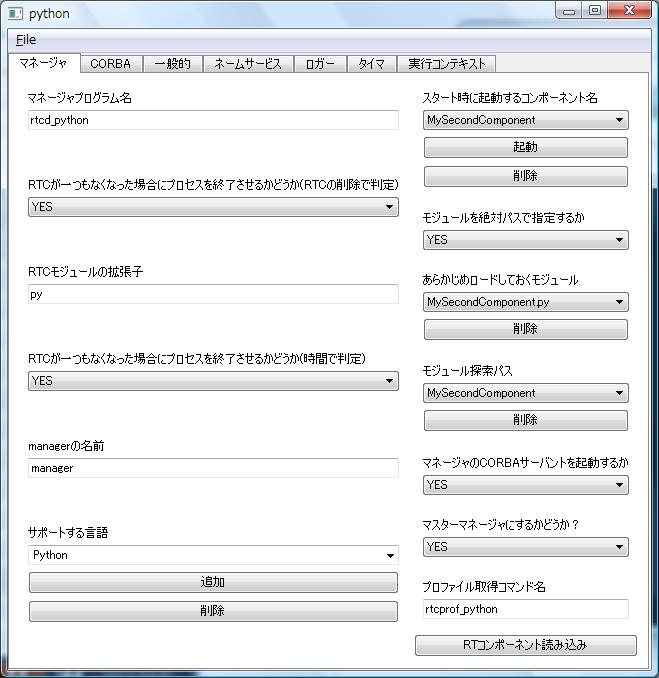
すると以下の画面が表示されます。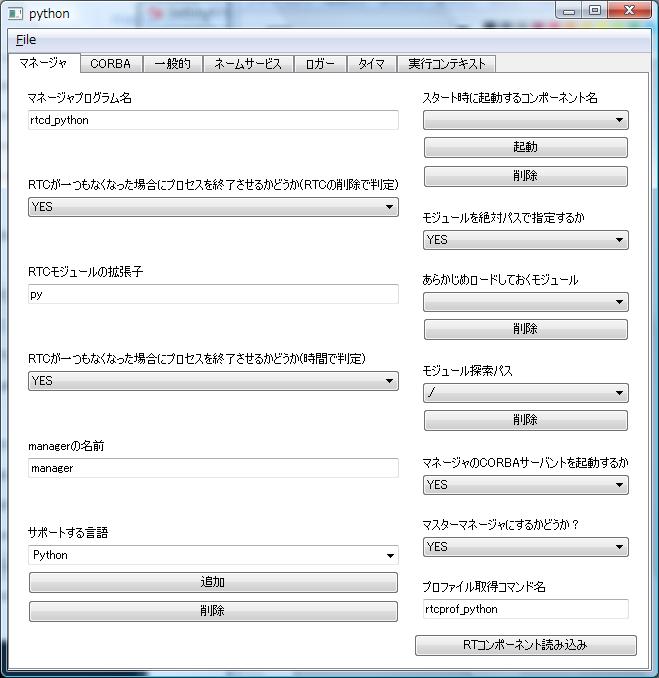
まあほとんどの項目が動的には反映されないので直接編集するのと大差はないのですが、RTCの起動だけは動的に行う事ができます。
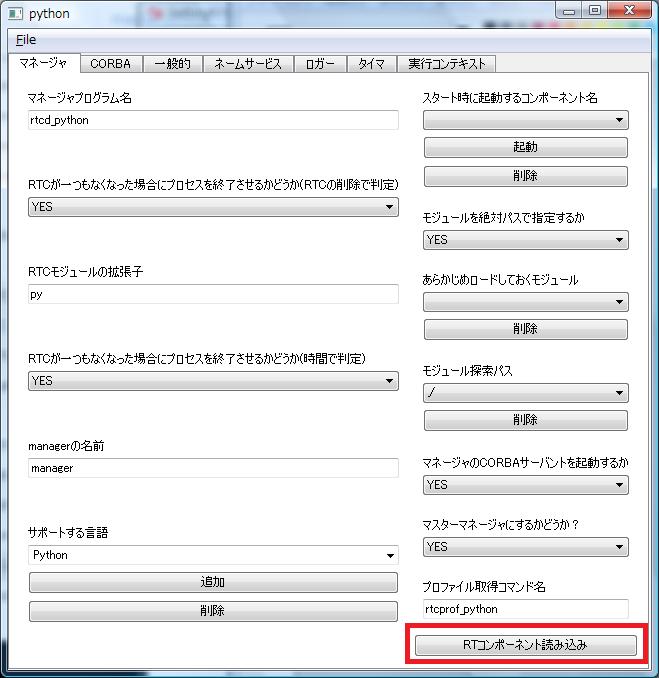
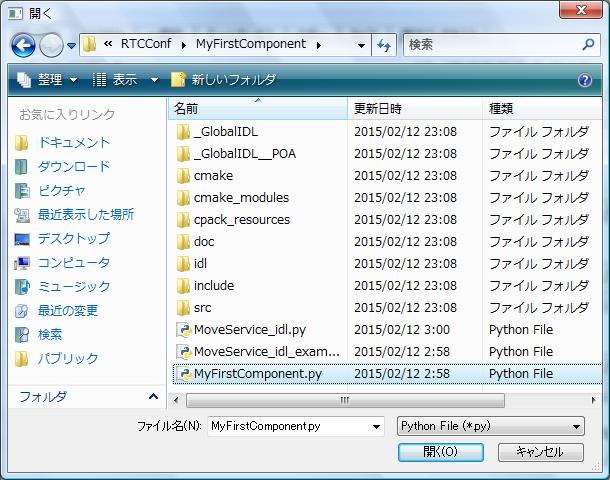
RTコンポーネント読み込みボタンを押してMyFirstComponentフォルダのMyFirstComponent.pyを開いてください。ちなみにサンプルプログラムを作るのが面倒だったのでSysML-RTMのチュートリアルで作ったやつをそのまま同梱してあります。
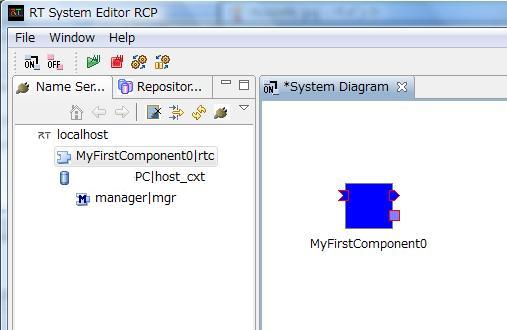
RTシステムエディタで確認するとRTCが起動している事が分かると思います。
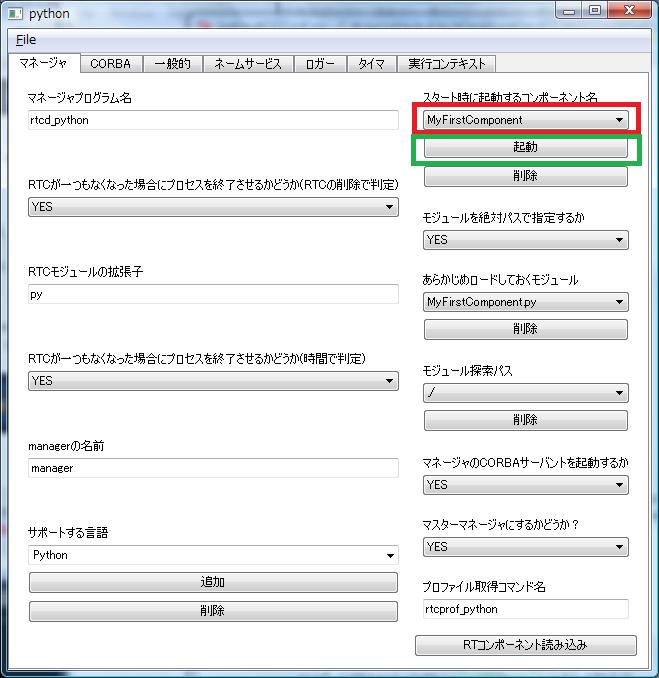
ちなみにスタート時に起動するコンポーネント名から先ほど起動したコンポーネントを選択して起動ボタンを押すともう一つ起動します。
先ほどの手順でRTCを起動するとあらかじめロードしておくモジュール、モジュール探索パスも自動的に設定されます。
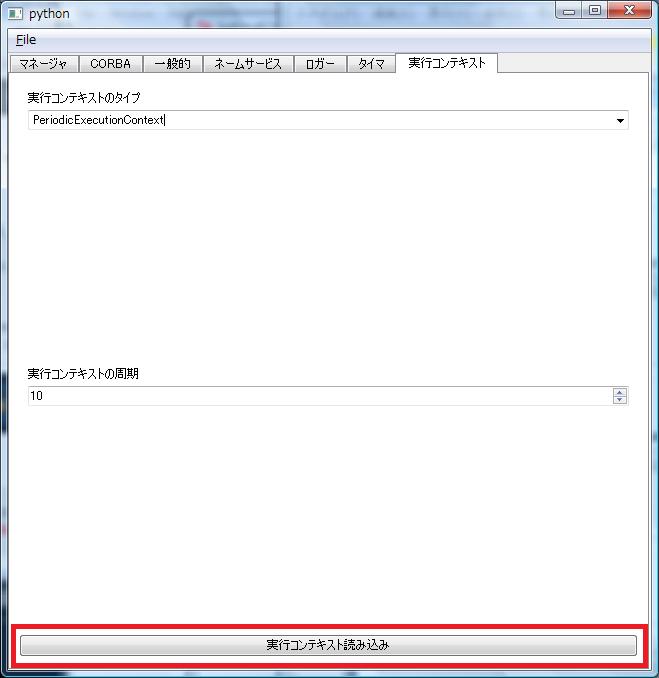
ちなみに独自の実行コンテキストも似たような手順で設定するとロードするモジュール、パスが自動的に設定できますが、再起動しなければ反映はされません。
設定が終わったらFile→Saveで出来れば同じフォルダにコンフィギュレーションファイルを保存してください。相対パスでモジュールの探索パスを設定しているので不具合が生じる可能性があります。
今の所Pythonのみしか作っていません。
要望があればC++版も作りたいと思います。
作ってみてから気がついたのですが、あまり需要なさそうですね。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

と言うか僕ぐらい記憶力が悪いと何の設定項目があったかを忘れます。
なのでGUI上の操作で簡単にできないかと思い、以下のソフトウェアを作りました。
単純にGUIで操作できるようにしただけなのであまり楽にはなってないかもしれないです。
ちなみにここからダウンロードできます。
動作にはPyQt4が必要です。
起動して最初の状態では以下のようになっていると思います。
とりあえずNewを選んで新規作成してください。
すると以下の画面が表示されます。
まあほとんどの項目が動的には反映されないので直接編集するのと大差はないのですが、RTCの起動だけは動的に行う事ができます。
RTコンポーネント読み込みボタンを押してMyFirstComponentフォルダのMyFirstComponent.pyを開いてください。ちなみにサンプルプログラムを作るのが面倒だったのでSysML-RTMのチュートリアルで作ったやつをそのまま同梱してあります。
RTシステムエディタで確認するとRTCが起動している事が分かると思います。
ちなみにスタート時に起動するコンポーネント名から先ほど起動したコンポーネントを選択して起動ボタンを押すともう一つ起動します。
先ほどの手順でRTCを起動するとあらかじめロードしておくモジュール、モジュール探索パスも自動的に設定されます。
ちなみに独自の実行コンテキストも似たような手順で設定するとロードするモジュール、パスが自動的に設定できますが、再起動しなければ反映はされません。
設定が終わったらFile→Saveで出来れば同じフォルダにコンフィギュレーションファイルを保存してください。相対パスでモジュールの探索パスを設定しているので不具合が生じる可能性があります。
今の所Pythonのみしか作っていません。
要望があればC++版も作りたいと思います。
作ってみてから気がついたのですが、あまり需要なさそうですね。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする
これは!
佐藤と申します.「脳科学の~」とか「視覚の~」とか言っている者です.このようなものこそ我々にとっては大変ありがたいと思っています.rtc.conf で何度苦労したことか...
我々は普段,計算理論構築やそのシミュレーションによる評価をおこなっています.OpenRTM-aist はいわば計算理論研究をより良く遂行するためのインフラと位置づけています.
要するに,OpenRTM の philosophy と脳計算論研究の要請が合致しているため大変魅力的だと思っているのですが,技術取得に難儀しています.新しく作った車(新しい脳計算論)を高速道路で(OpenRTMで)走らせたいのに,その高速に乗るためには取得困難なライセンス取得,さらには高速道路自体を改修しなければならない状態です.もっともおかげさまで脳研究として新しい知見を得ることができました.
今後もいろいろ勉強させてください.
我々は普段,計算理論構築やそのシミュレーションによる評価をおこなっています.OpenRTM-aist はいわば計算理論研究をより良く遂行するためのインフラと位置づけています.
要するに,OpenRTM の philosophy と脳計算論研究の要請が合致しているため大変魅力的だと思っているのですが,技術取得に難儀しています.新しく作った車(新しい脳計算論)を高速道路で(OpenRTMで)走らせたいのに,その高速に乗るためには取得困難なライセンス取得,さらには高速道路自体を改修しなければならない状態です.もっともおかげさまで脳研究として新しい知見を得ることができました.
今後もいろいろ勉強させてください.