ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
痛恨のミスをしていた事に気付きました。
手先のモーターがハンドを閉じるためのものだと思っていたのですが、手先を回転させるモーターでした。ひょっとしたら今までで一番アホなミスかもしれないです。
とりあえず今まで作成したシミュレータ、RTCは修正しておきました。
それからGUIを改良しました。
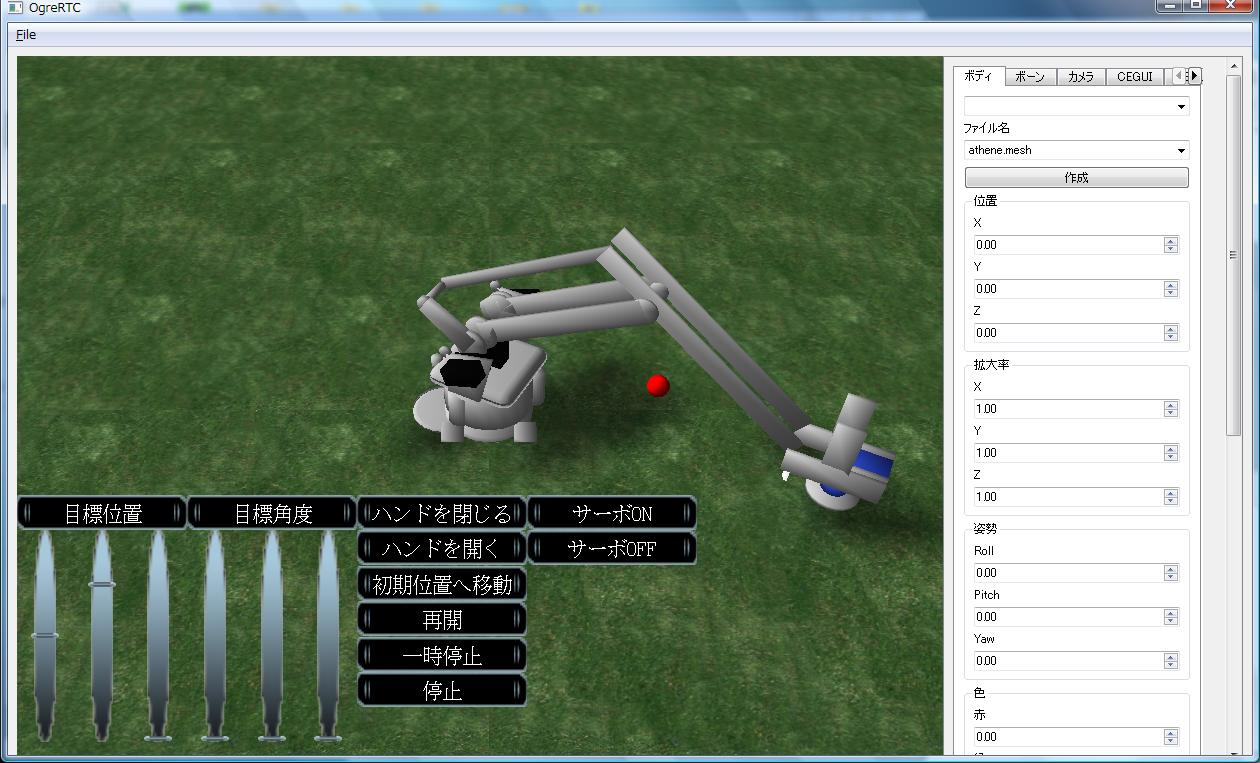
一見して何も変わっていないように見えますが、実はロボットのモデルを変更してあります。
それから例のロボットアームを買ってしまいました。
欲求に負けてしまいました。
何だか仕様書がないのですが大丈夫でしょうか?もちろん僕がロボットを壊すかもしれないと言う意味でですけど。
とりあえずサーボモータの動作確認をしただけです。
後シミュレータ、GUIのモデルの寸法を実機に合わせておきました。仕様書が無いために自分で測った長さなのでかなり適当です。
ここまででやった事は、
EdisonでOpenRTM-aist、OpenRTM-aist-Pythonの動作確認
Edisonでネームサービス、RTCの自動起動を実装
アームの手先位置制御に必要な数式の導出
アームのシミュレーション
アーム操作用GUIの作成
後はEdisonにアーム制御のRTCを実装するだけです。
全然関係ないけど、例のアームの動画を探していたら関連動画で面白い動画を見つけました。
ちょっと手際が良すぎるだろと思いました。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

手先のモーターがハンドを閉じるためのものだと思っていたのですが、手先を回転させるモーターでした。ひょっとしたら今までで一番アホなミスかもしれないです。
とりあえず今まで作成したシミュレータ、RTCは修正しておきました。
それからGUIを改良しました。
一見して何も変わっていないように見えますが、実はロボットのモデルを変更してあります。
それから例のロボットアームを買ってしまいました。
欲求に負けてしまいました。
何だか仕様書がないのですが大丈夫でしょうか?もちろん僕がロボットを壊すかもしれないと言う意味でですけど。
とりあえずサーボモータの動作確認をしただけです。
後シミュレータ、GUIのモデルの寸法を実機に合わせておきました。仕様書が無いために自分で測った長さなのでかなり適当です。
ここまででやった事は、
EdisonでOpenRTM-aist、OpenRTM-aist-Pythonの動作確認
Edisonでネームサービス、RTCの自動起動を実装
アームの手先位置制御に必要な数式の導出
アームのシミュレーション
アーム操作用GUIの作成
後はEdisonにアーム制御のRTCを実装するだけです。
全然関係ないけど、例のアームの動画を探していたら関連動画で面白い動画を見つけました。
ちょっと手際が良すぎるだろと思いました。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする