ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
どうにもモーターのトルクが足らないらしくクローラーが旋回できません。
クローラーのシミュレーションとかできれば良かったのですが、そんな簡単な話でもないだろうしなあ。以前作ったシミュレーターとかどの程度信用できるのか分かっていませんし、静力学で求めるにしてもどちらにしろ摩擦係数が分かっていないと計算はできないと思うので計算する意味が今一つ分かりません。何と言うか仮定だらけの理論で計算して実験結果は似たような傾向になりましたとか言っても、仮定が合っている事にはならないと思うのですよね。
試しに静力学で必要なトルクを求めてみます。
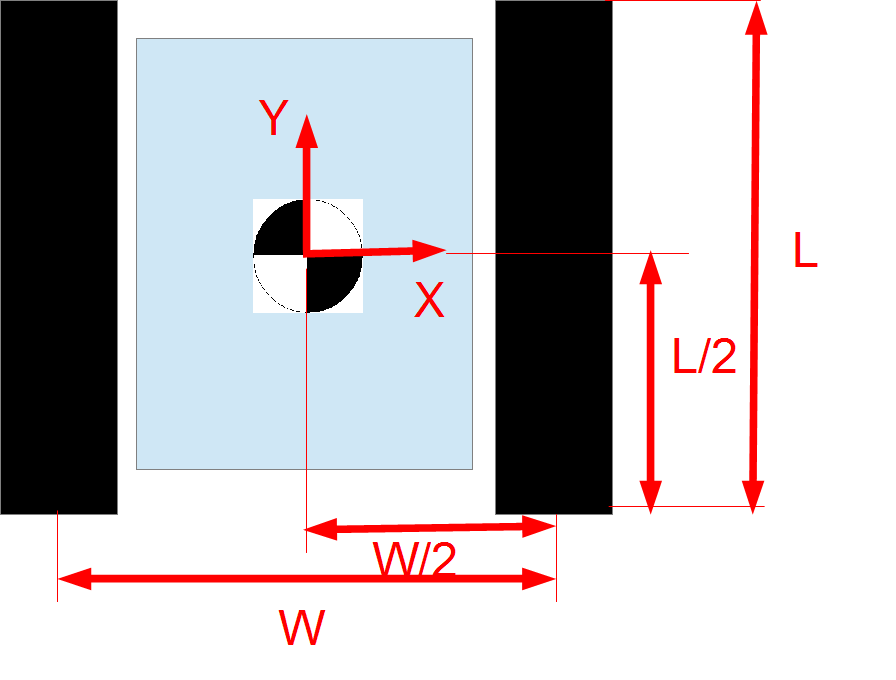
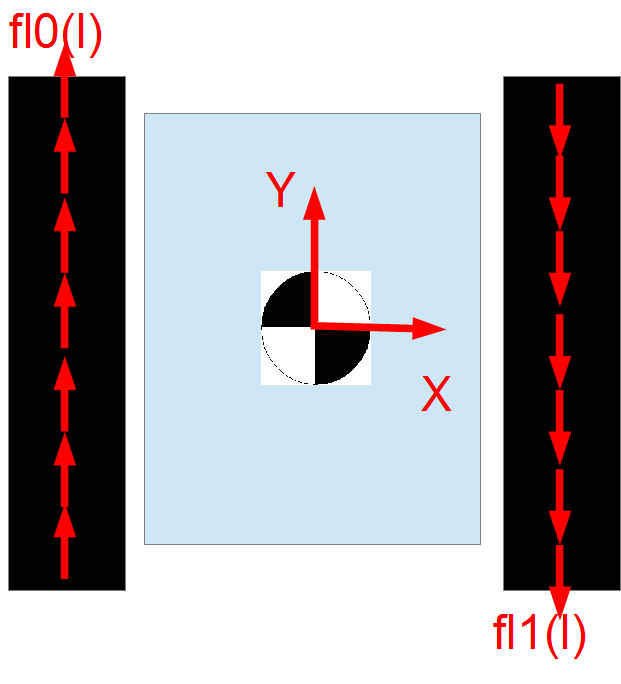
まず左キャタピラのY軸方向に働く摩擦力はfl0(l)、右キャタピラはfl1(l)という関数で定義されている事にします。
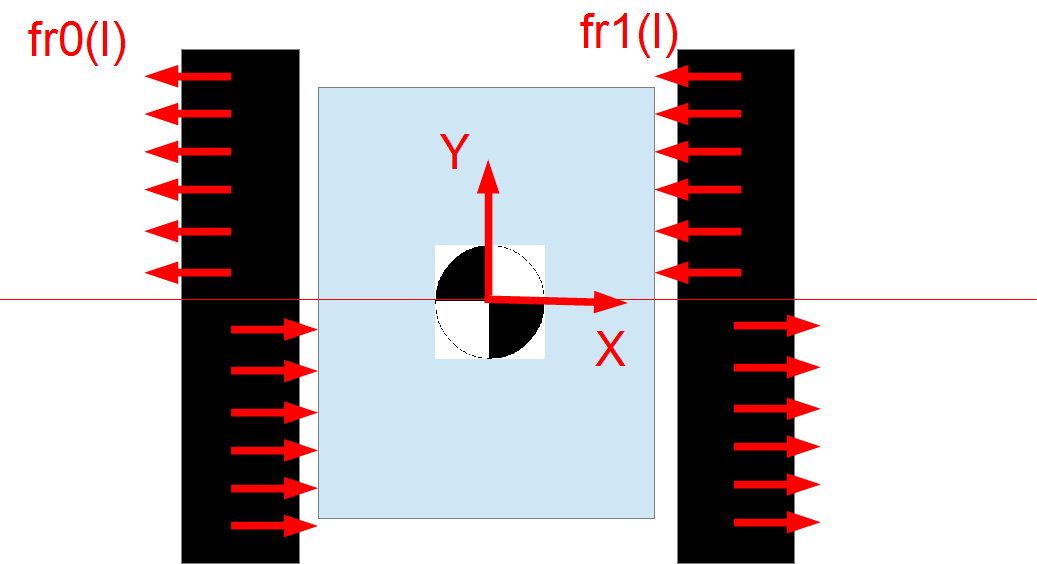
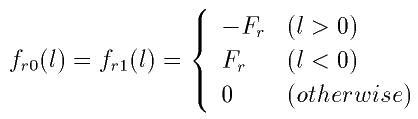
次にX軸方向の摩擦力もfr0(l)、fr1(l)という関数で表わされます。
X軸方向、Y軸方向、モーメントのつりあいは以下のように導出できます。
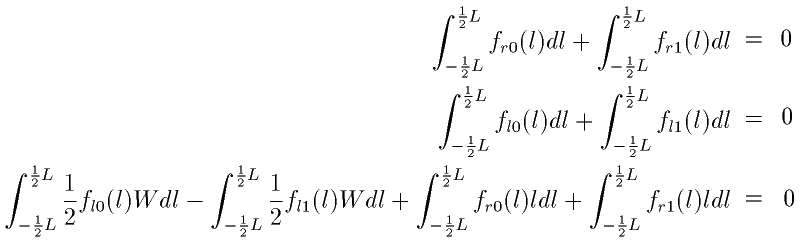
このままでは変数の数が多すぎて必要トルクを求めるのは無理そうなので以下の仮定を設定します。
まずはY軸方向の摩擦力は上の図の方向に均等に力が加わっている事にします。

次にX軸方向の摩擦力も上の図の方向に均等に力が加わっている事にします。
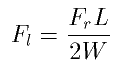
すると以下の式を導出できます。
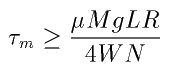
さらにFrが静止摩擦力を超えれば旋回できるので、旋回できる条件は以下のようになります。
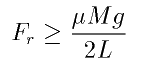
ここでμは静止摩擦係数、Mはロボット全体の質量、gは重力加速度です。
垂直抗力はキャタピラに均等に加わっていると仮定しています。
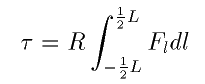
車輪の半径をRとすると車軸に必要なトルクは以下の式になります。
よってギア比をNとするとモーターに必要なトルクは以下の式で導出できます。
後は各パラメータを入力すればトルクは導出できますが、正直なところあまり信用できません。
これで導出した値からさらに余裕をもったトルクを出力できるモーターを選ぶと思うのですが、それで動くのは当たり前だと思うので解析が妥当だったと言う事にはならないと思います。強いモーターを使えば動くだろうと言う事は子供でも予想できます。それをこのように解析して「トルクの大きなモータを使えば動くんだ!!」とか言って実際に動いたから理論は正しかったと言うのは屁理屈以前の問題です。参考程度に使うのは良いかもしれません。ただ実験が上手く言ったからと言って解析が正しいと言うのは違和感があります。
とりあえずモータードライバICですが、TA7279Pでは最大2Aなので他のモータードライバICを使うか、もしくはFETで自作するかしなければなりません。
今日はこの辺にしておきます。
何かを思いついたらまた書きます。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

クローラーのシミュレーションとかできれば良かったのですが、そんな簡単な話でもないだろうしなあ。以前作ったシミュレーターとかどの程度信用できるのか分かっていませんし、静力学で求めるにしてもどちらにしろ摩擦係数が分かっていないと計算はできないと思うので計算する意味が今一つ分かりません。何と言うか仮定だらけの理論で計算して実験結果は似たような傾向になりましたとか言っても、仮定が合っている事にはならないと思うのですよね。
試しに静力学で必要なトルクを求めてみます。
まず左キャタピラのY軸方向に働く摩擦力はfl0(l)、右キャタピラはfl1(l)という関数で定義されている事にします。
次にX軸方向の摩擦力もfr0(l)、fr1(l)という関数で表わされます。
X軸方向、Y軸方向、モーメントのつりあいは以下のように導出できます。
このままでは変数の数が多すぎて必要トルクを求めるのは無理そうなので以下の仮定を設定します。
まずはY軸方向の摩擦力は上の図の方向に均等に力が加わっている事にします。
次にX軸方向の摩擦力も上の図の方向に均等に力が加わっている事にします。
すると以下の式を導出できます。
さらにFrが静止摩擦力を超えれば旋回できるので、旋回できる条件は以下のようになります。
ここでμは静止摩擦係数、Mはロボット全体の質量、gは重力加速度です。
垂直抗力はキャタピラに均等に加わっていると仮定しています。
車輪の半径をRとすると車軸に必要なトルクは以下の式になります。
よってギア比をNとするとモーターに必要なトルクは以下の式で導出できます。
後は各パラメータを入力すればトルクは導出できますが、正直なところあまり信用できません。
これで導出した値からさらに余裕をもったトルクを出力できるモーターを選ぶと思うのですが、それで動くのは当たり前だと思うので解析が妥当だったと言う事にはならないと思います。強いモーターを使えば動くだろうと言う事は子供でも予想できます。それをこのように解析して「トルクの大きなモータを使えば動くんだ!!」とか言って実際に動いたから理論は正しかったと言うのは屁理屈以前の問題です。参考程度に使うのは良いかもしれません。ただ実験が上手く言ったからと言って解析が正しいと言うのは違和感があります。
とりあえずモータードライバICですが、TA7279Pでは最大2Aなので他のモータードライバICを使うか、もしくはFETで自作するかしなければなりません。
今日はこの辺にしておきます。
何かを思いついたらまた書きます。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする