ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
今のロボットに合わせてGUIを変更しました。
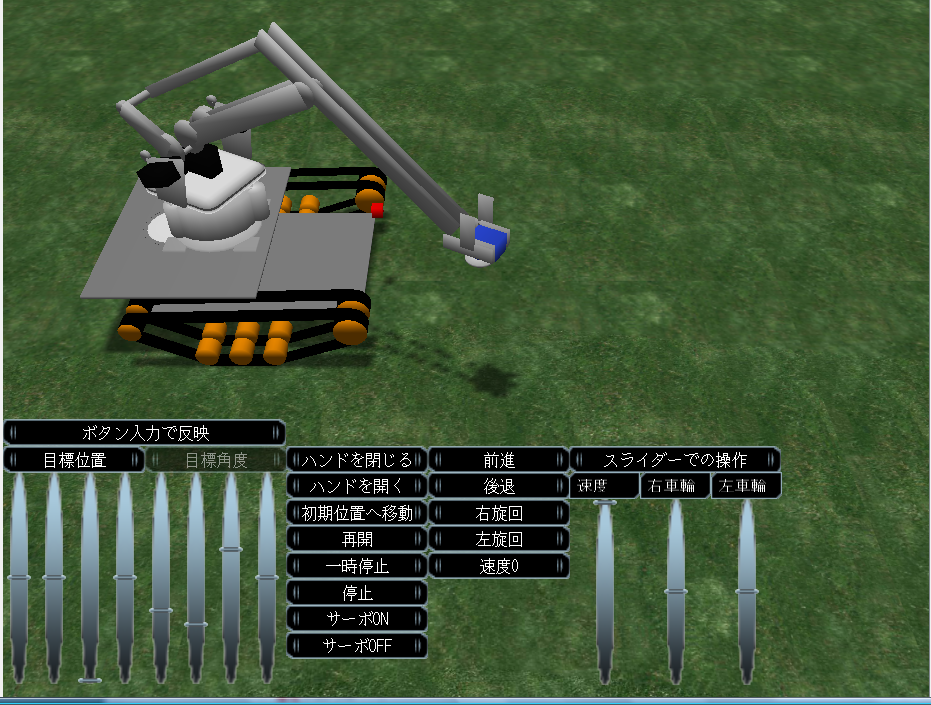
後、スライダーで手先の目標位置、関節角度を変更したときに今まではボタンを押さないと実機、シミュレータの動作に反映されませんでしたが、スライダーでの変更時に反映できるようにもしておきました。
どうにもI2Cの使い方よくわかりません。
MM-TXS05という加速度、地磁気センサを使おうと思ったのですが何故か動作できませんでした。
arduinoでは普通に動作できていたのですけど、例の内部プルアップが問題なのでしょうかね?
MM-TXS05のレベル変換ICの内部でプルアップしているにもかかわらずEdison内部でもプルアップしているのが問題かもしれません。
でもarduinoでI2C通信する場合も20kΩぐらいの抵抗で内部プルアップしていると思うので抵抗値の問題なのでしょうかね?
Edisonのプルアップを無効にする方法を探しているのですがよくわかりませんでした。
/sys/kernel/debug/gpio_debug/gpio**/current_pullmodeで変更できるとかどこかで見たのですが、nopullに変更しても特に変化なし。
もっと詳しい資料はないかとこのサイトを読んでみてIO18とIO19のプルアップ有効化はGPIO212とGPIO213をinにすれば無効にできると思ったのですが最初からinになっていました。と言うよりもこのプルアップはArduino基盤上のプルアップで、Edison内部のプルアップは別にあると言う事なのかもしれないです。つまりGPIO212をhighにしたら更にもう一つプルアップ抵抗を追加した状態になると言う事でしょうかね?
まあ別のセンサもあるのでそちらを使おうと思っているのですが3.3Vで動作なのでレベル変換が必要です。・・・・そう思っていたのですが、3.3VでもHighかLowを判別できるみたいなので動作できるみたいです。多少問題はありそうですがそれならばそれで構わない・・・・のか?
何か進んだらまた書きます。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

後、スライダーで手先の目標位置、関節角度を変更したときに今まではボタンを押さないと実機、シミュレータの動作に反映されませんでしたが、スライダーでの変更時に反映できるようにもしておきました。
どうにもI2Cの使い方よくわかりません。
MM-TXS05という加速度、地磁気センサを使おうと思ったのですが何故か動作できませんでした。
arduinoでは普通に動作できていたのですけど、例の内部プルアップが問題なのでしょうかね?
MM-TXS05のレベル変換ICの内部でプルアップしているにもかかわらずEdison内部でもプルアップしているのが問題かもしれません。
でもarduinoでI2C通信する場合も20kΩぐらいの抵抗で内部プルアップしていると思うので抵抗値の問題なのでしょうかね?
Edisonのプルアップを無効にする方法を探しているのですがよくわかりませんでした。
/sys/kernel/debug/gpio_debug/gpio**/current_pullmodeで変更できるとかどこかで見たのですが、nopullに変更しても特に変化なし。
もっと詳しい資料はないかとこのサイトを読んでみてIO18とIO19のプルアップ有効化はGPIO212とGPIO213をinにすれば無効にできると思ったのですが最初からinになっていました。と言うよりもこのプルアップはArduino基盤上のプルアップで、Edison内部のプルアップは別にあると言う事なのかもしれないです。つまりGPIO212をhighにしたら更にもう一つプルアップ抵抗を追加した状態になると言う事でしょうかね?
まあ別のセンサもあるのでそちらを使おうと思っているのですが3.3Vで動作なのでレベル変換が必要です。・・・・そう思っていたのですが、3.3VでもHighかLowを判別できるみたいなので動作できるみたいです。多少問題はありそうですがそれならばそれで構わない・・・・のか?
何か進んだらまた書きます。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする