ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
突然ですがクイズです。
前回に記事の中でふざけている所が一箇所あります。
さてどこでしょうか?
ちょっと脱がせ方が安易だったかもしれません。
正面から見ると普通に服を着ていますが、最後に背中が映ると貧ぼっちゃま状態の方が面白かったかもしれませんね。
何も思い浮かばないのはアームが移動しないからだと思うので、こんな感じにしたいと思います。
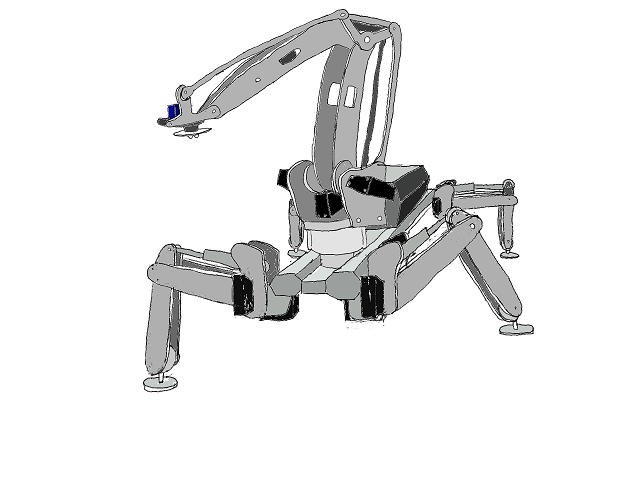
と言うわけで市販の四脚ロボットを調べてみました。
まずこの製品は5万円ですか・・・・無理そうですね。
どうにもサーボが高いらしい。何でコマンド式サーボはこんなに高いのだろうか?
各脚に2自由度ずつしか自由度がないのは少し厳しいですね。
各脚に3自由度あるロボットもあるみたいですが18万円は論外です。
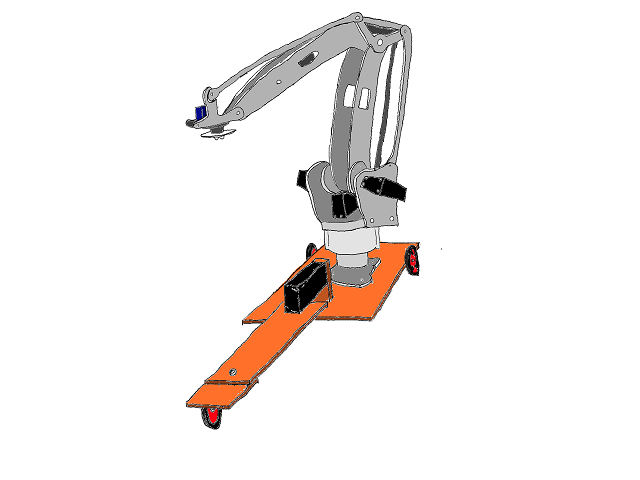
プラズマカーなんかどうだろうかと思いましたが、あんな揺れる乗り物に載せるのは難しそうなのでやめておきます。制御と言う意味では面白そうなのですがね。
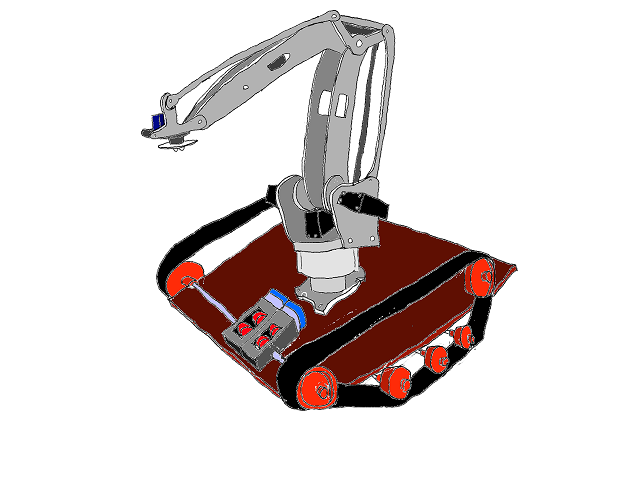
仕方ないのでキャタピラで妥協します。
やる気がないせいかいつも以上に雑に書いてしまいました。
単にゲームのコントローラー等で操作できるようにするだけでは面白くありません。
そこで自動的に対象物の近くまで移動してアームの先端を対象物まで移動させるという制御をしようと思った場合を考えてみましょう。
まずクローラーは非ホロノミック系のシステムだと思うので目的地まで移動させるのは簡単ではないです。
それ以前にどうやって自己位置推定をするかを考えると、
つまり、
測域センサとかあれば適当に動き回って対象物と似たような形状の物体があればそこまで移動するとかできそうですが持っていないのでできません。
とりあえずロボットだけ作ってみました。
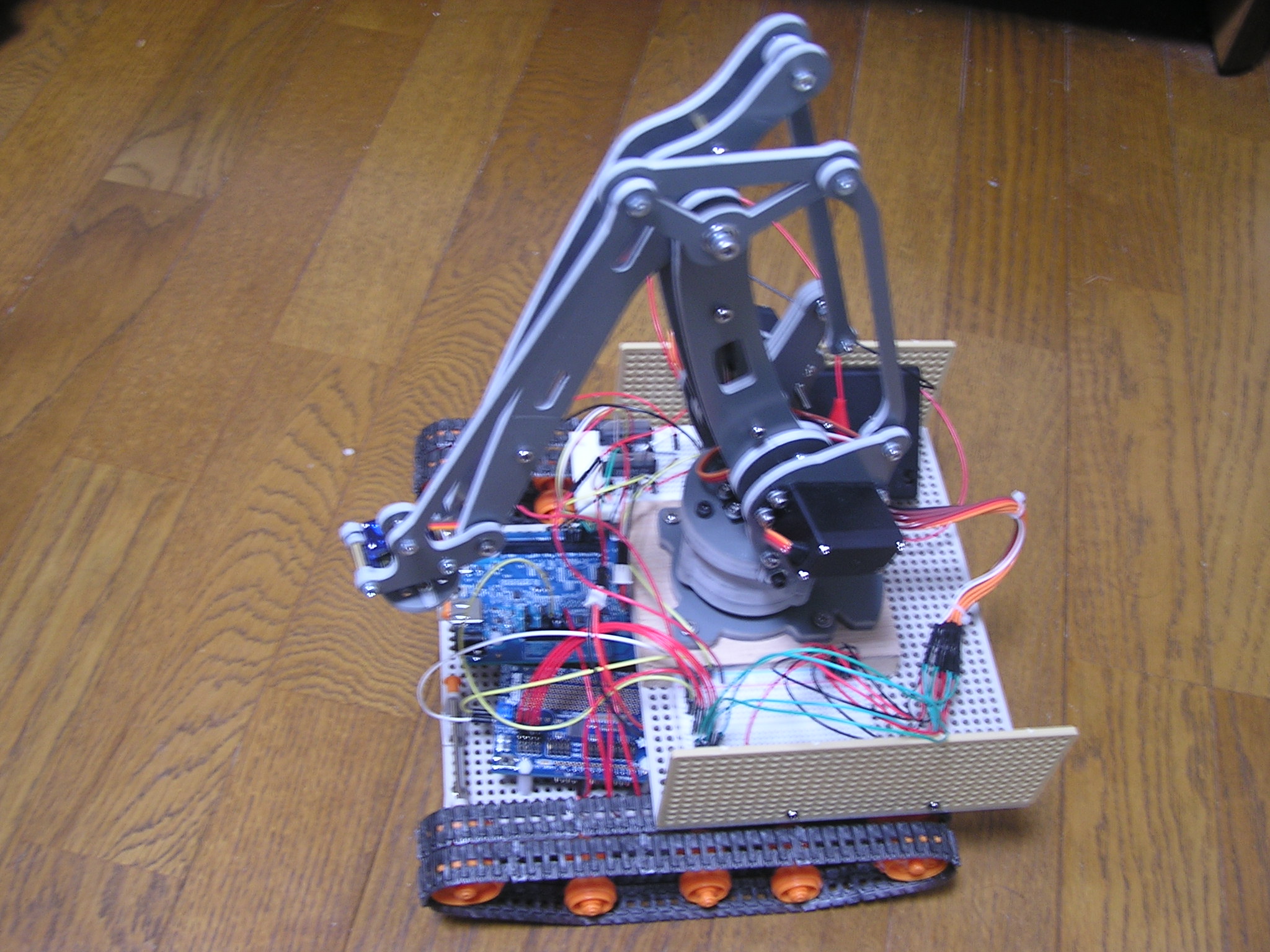
なんだか絵と違いますが、ちょっとEdisonの基盤がでかすぎたので二段になってしまいました。
これならBreakout Boardの方を買えば良かったかもしれないです。
クローラーのモーター制御のRTCはここ、PCA9685の操作RTCはここに置いておきます。
クローラーのモーターはモータードライバICで制御します。モータドライバICへの入力はEdisonのGPIOから直接入力しますが、ロボットアームのサーボモータへの入力はPCA9685にI2Cで通信してからPCA9685からPWMを入力しています。
結果的にクローラーの制御RTCとロボットアームの制御RTCを切り離せたのは良かったかもしれないですね。
それからArduinoから直接ロボットアームが制御できるようにRTnoで動作するサーボモーター制御RTCを作っておいたので、Edisonを持っていなくてもこれとアーム制御RTC、操作用GUIのRTCを使えば普通のPCとArduinoでロボットアームの制御ができます。
とりあえず、今は制御をどうするかを考えている所です。
思いついたらまた書きます。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

前回に記事の中でふざけている所が一箇所あります。
さてどこでしょうか?
ちょっと脱がせ方が安易だったかもしれません。
正面から見ると普通に服を着ていますが、最後に背中が映ると貧ぼっちゃま状態の方が面白かったかもしれませんね。
何も思い浮かばないのはアームが移動しないからだと思うので、こんな感じにしたいと思います。
と言うわけで市販の四脚ロボットを調べてみました。
まずこの製品は5万円ですか・・・・無理そうですね。
どうにもサーボが高いらしい。何でコマンド式サーボはこんなに高いのだろうか?
各脚に2自由度ずつしか自由度がないのは少し厳しいですね。
各脚に3自由度あるロボットもあるみたいですが18万円は論外です。
プラズマカーなんかどうだろうかと思いましたが、あんな揺れる乗り物に載せるのは難しそうなのでやめておきます。制御と言う意味では面白そうなのですがね。
仕方ないのでキャタピラで妥協します。
やる気がないせいかいつも以上に雑に書いてしまいました。
単にゲームのコントローラー等で操作できるようにするだけでは面白くありません。
そこで自動的に対象物の近くまで移動してアームの先端を対象物まで移動させるという制御をしようと思った場合を考えてみましょう。
まずクローラーは非ホロノミック系のシステムだと思うので目的地まで移動させるのは簡単ではないです。
それ以前にどうやって自己位置推定をするかを考えると、
- オドメトリ → エンコーダを持ってないため不可
- マーカーを付けてカメラで計測 → カメラは縛っているので不可
- 加速度センサで計測した値を二重積分、ジャイロセンサで計測した値を積分 → どうだろう?
- GPS→そんな広い範囲を動くわけではないのであまり向いてないように思う
つまり、
- 車輪の速度制御ができない
- 加速度センサ、ジャイロセンサで計測した値を積分するので相当な誤差が生じる
測域センサとかあれば適当に動き回って対象物と似たような形状の物体があればそこまで移動するとかできそうですが持っていないのでできません。
とりあえずロボットだけ作ってみました。
なんだか絵と違いますが、ちょっとEdisonの基盤がでかすぎたので二段になってしまいました。
これならBreakout Boardの方を買えば良かったかもしれないです。
クローラーのモーター制御のRTCはここ、PCA9685の操作RTCはここに置いておきます。
クローラーのモーターはモータードライバICで制御します。モータドライバICへの入力はEdisonのGPIOから直接入力しますが、ロボットアームのサーボモータへの入力はPCA9685にI2Cで通信してからPCA9685からPWMを入力しています。
結果的にクローラーの制御RTCとロボットアームの制御RTCを切り離せたのは良かったかもしれないですね。
それからArduinoから直接ロボットアームが制御できるようにRTnoで動作するサーボモーター制御RTCを作っておいたので、Edisonを持っていなくてもこれとアーム制御RTC、操作用GUIのRTCを使えば普通のPCとArduinoでロボットアームの制御ができます。
とりあえず、今は制御をどうするかを考えている所です。
思いついたらまた書きます。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする