ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
以前紹介したインストール簡易化ツールも配布することにしました。
ここからダウンロードできます。
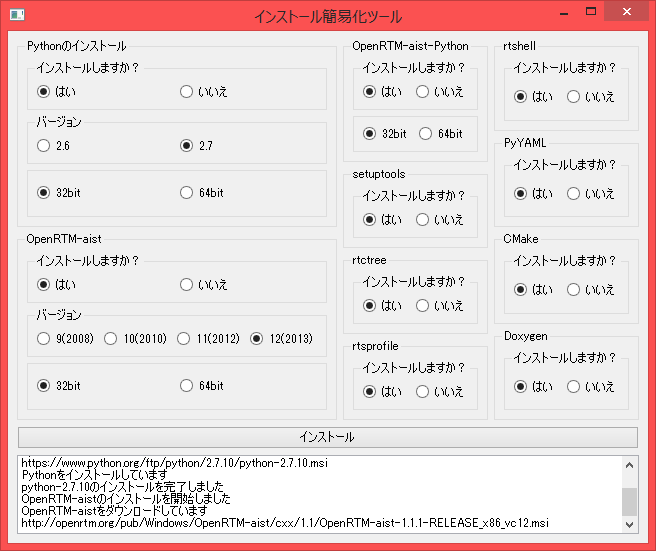
どうやら既存のツールがあるらしいのですが、2011年以降更新されていなさそうな事と僕の環境で動作できなかったので別のツールを作成する事にしました。
OSの問題かなあ?当時はWindows 8はなかっただろうし動作できないのかもしれません。
どうやらあっちにはアップデート検出機能と依存関係の自動解決機能があるらしいので実質的に上位互換のような気もします。どうやって依存関係の自動解決なんてやっているのでしょうね?
後、例のツールの一部のPythonのプログラムをEXEに固めたのでlxml、wasanbonのインストールは不要になりました。おかげでGPL感染してしまったのが残念ですが、これで多少使いやすくなったかもしれません。
どちらにせよ、OpenRTM-aist-Python、rtctree、rtshell、rtsprofile、Pythonのインストールは必須なのでインストール簡易化ツールでインストールしてください。
RTCをリストから選択して起動する機能は最初からインストールされているRTCが多ければ面白いかもしれませんが、まだそろっていないのであまり役に立ちそうにないです。
とりあえずいままで作ったRTCを同梱するようにはしてみます。
今のところ40種類ぐらいのRTCを同梱するつもりです。
ただRTC.xmlは誰も読まないだろうと思って適当に作ってきたので、説明文等を追加している所です。
まあwasanbonがRTC.xmlを使うみたいなので、RTC.xmlを使う機会も増えているかもしれないです。
もはやマニュアルを読ませることでRTCの機能を理解させるというやり方は古くなりつつあると思います。
RTC.xmlに詳細を記述してなんらかのツールで表示させる、そして必要ならばツールでRTCを起動するというのが主流のやり方になると思うのでRTC.xmlは入念に編集するようにしてください。
それからRTCの数が多くなるとリストから選ぶのが面倒になりそうなのでカテゴリ名でさらに分けました。正直なところカテゴリ名はいままで適当に付けてきたのですが、これからはちゃんとした名前を付けようと思います。
カテゴリ名を付けるにもある程度ルールがあった方が良いかもしれません。
OpenRTM-aistのサンプルのカテゴリ名はexampleに設定されていますが、OpenCVのRTCのサンプルはCategoryとなっているので、明確なルールはないのかもしれないです。
ただOpenRTM-aistのサイトにプロジェクトを作成するときに以下の一覧からカテゴリ名を選択する事ができます。
actuator device
arm
control
detection
filter
logger
logic
manipulator
real-time
recorder
signal processing
neural network
soft-computing
switching
viewer
image processing
input device
mobile platform
mobile robot navigation
primitive device
sensor device
speech processing
とりあえずこの中からRTCのカテゴリ名を選択するようにすればいいのじゃないかなあ?

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

ここからダウンロードできます。
どうやら既存のツールがあるらしいのですが、2011年以降更新されていなさそうな事と僕の環境で動作できなかったので別のツールを作成する事にしました。
OSの問題かなあ?当時はWindows 8はなかっただろうし動作できないのかもしれません。
どうやらあっちにはアップデート検出機能と依存関係の自動解決機能があるらしいので実質的に上位互換のような気もします。どうやって依存関係の自動解決なんてやっているのでしょうね?
後、例のツールの一部のPythonのプログラムをEXEに固めたのでlxml、wasanbonのインストールは不要になりました。おかげでGPL感染してしまったのが残念ですが、これで多少使いやすくなったかもしれません。
どちらにせよ、OpenRTM-aist-Python、rtctree、rtshell、rtsprofile、Pythonのインストールは必須なのでインストール簡易化ツールでインストールしてください。
RTCをリストから選択して起動する機能は最初からインストールされているRTCが多ければ面白いかもしれませんが、まだそろっていないのであまり役に立ちそうにないです。
とりあえずいままで作ったRTCを同梱するようにはしてみます。
今のところ40種類ぐらいのRTCを同梱するつもりです。
ただRTC.xmlは誰も読まないだろうと思って適当に作ってきたので、説明文等を追加している所です。
まあwasanbonがRTC.xmlを使うみたいなので、RTC.xmlを使う機会も増えているかもしれないです。
もはやマニュアルを読ませることでRTCの機能を理解させるというやり方は古くなりつつあると思います。
RTC.xmlに詳細を記述してなんらかのツールで表示させる、そして必要ならばツールでRTCを起動するというのが主流のやり方になると思うのでRTC.xmlは入念に編集するようにしてください。
それからRTCの数が多くなるとリストから選ぶのが面倒になりそうなのでカテゴリ名でさらに分けました。正直なところカテゴリ名はいままで適当に付けてきたのですが、これからはちゃんとした名前を付けようと思います。
カテゴリ名を付けるにもある程度ルールがあった方が良いかもしれません。
OpenRTM-aistのサンプルのカテゴリ名はexampleに設定されていますが、OpenCVのRTCのサンプルはCategoryとなっているので、明確なルールはないのかもしれないです。
ただOpenRTM-aistのサイトにプロジェクトを作成するときに以下の一覧からカテゴリ名を選択する事ができます。
actuator device
arm
control
detection
filter
logger
logic
manipulator
real-time
recorder
signal processing
neural network
soft-computing
switching
viewer
image processing
input device
mobile platform
mobile robot navigation
primitive device
sensor device
speech processing
とりあえずこの中からRTCのカテゴリ名を選択するようにすればいいのじゃないかなあ?
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする