ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
ネットワークアダプタが複数あると上手く通信できない事があるわけですが、31人もいると多分誰かはやらかすと考えています。
説明用スライドとチュートリアルのページにも書いてはいますが、一見して不具合が発生しているかが分かりづらいのが問題です。
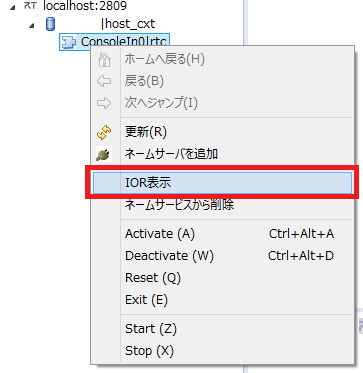
一応OpenRTP 1.1.2ではIORからオブジェクトの情報を表示してくれるので、それを見れば確認はできます。
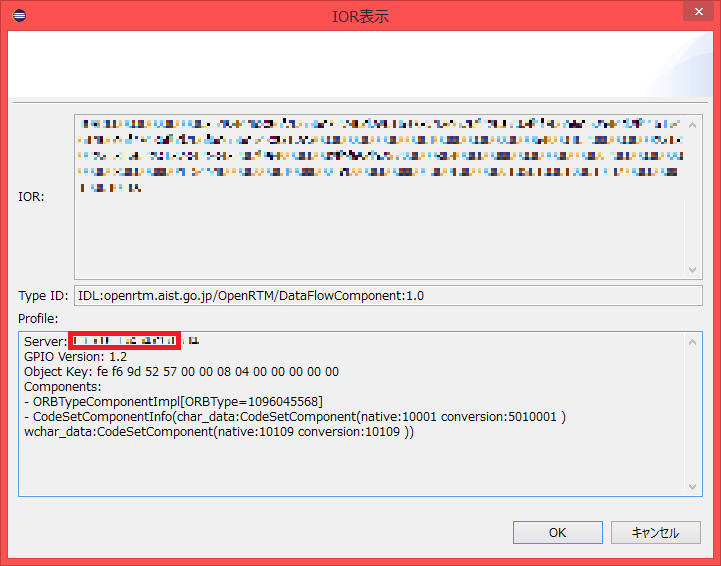
表示されたIPアドレスがEV3の場合は192.168.0.2、ラズパイマウスの場合は192.168.11.2(多分)になっていなければおそらく不具合が発生しています。
例えば無線LANで接続したネットワークでIPアドレス152.160.33.2が割り振られているとします。
この場合はEV3やラズパイからは到達できないIPアドレスなので、EV3やラズパイマウスからの通信は失敗します。
解決方法としては無線LAN等を切るか、あるいはrtc.confでエンドポイントを明示的に指定するかの方法があります。
corba.endpoint: 192.168.0.2:
ただ講習会に参加する方は初心者だと思うので、rtc.confをいじるのはあまりおすすめしません。
素直に無線LANを切断してください。
それからRTCをexitせずに×を押してプロセスを終了してRTシステムエディタが固まるということも絶対に誰かはやらかします。これは断言します。
相手のRTCとの通信が途切れている場合、PortBaseクラスのupdateConnectors関数が呼び出された時にコネクタが削除されます。updateConnectors関数はget_port_profile関数、get_connector_profiles関数、get_connector_profiles関数で呼び出されるので、RTシステムエディタでRTCを表示しているとこれらの操作を呼び出して勝手に削除します。
これが別のマシンのRTCと接続している場合に時間がかかる場合があるみたいです。
とりあえずrtc.confでCORBA通信のタイムアウトを設定したら切断するまでの時間が速くなったのですが、これはデフォルト値0のはずなのでむしろ遅くなるように思うので謎です。
corba.args: -ORBclientConnectTimeOutPeriod 5000
まあ普通にexitするかCtrl+Cで消せば大丈夫なのでそうしてください。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

説明用スライドとチュートリアルのページにも書いてはいますが、一見して不具合が発生しているかが分かりづらいのが問題です。
一応OpenRTP 1.1.2ではIORからオブジェクトの情報を表示してくれるので、それを見れば確認はできます。
表示されたIPアドレスがEV3の場合は192.168.0.2、ラズパイマウスの場合は192.168.11.2(多分)になっていなければおそらく不具合が発生しています。
例えば無線LANで接続したネットワークでIPアドレス152.160.33.2が割り振られているとします。
この場合はEV3やラズパイからは到達できないIPアドレスなので、EV3やラズパイマウスからの通信は失敗します。
解決方法としては無線LAN等を切るか、あるいはrtc.confでエンドポイントを明示的に指定するかの方法があります。
corba.endpoint: 192.168.0.2:
ただ講習会に参加する方は初心者だと思うので、rtc.confをいじるのはあまりおすすめしません。
素直に無線LANを切断してください。
それからRTCをexitせずに×を押してプロセスを終了してRTシステムエディタが固まるということも絶対に誰かはやらかします。これは断言します。
相手のRTCとの通信が途切れている場合、PortBaseクラスのupdateConnectors関数が呼び出された時にコネクタが削除されます。updateConnectors関数はget_port_profile関数、get_connector_profiles関数、get_connector_profiles関数で呼び出されるので、RTシステムエディタでRTCを表示しているとこれらの操作を呼び出して勝手に削除します。
これが別のマシンのRTCと接続している場合に時間がかかる場合があるみたいです。
とりあえずrtc.confでCORBA通信のタイムアウトを設定したら切断するまでの時間が速くなったのですが、これはデフォルト値0のはずなのでむしろ遅くなるように思うので謎です。
corba.args: -ORBclientConnectTimeOutPeriod 5000
まあ普通にexitするかCtrl+Cで消せば大丈夫なのでそうしてください。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする