ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
ひょっとしたらジャイロセンサ、地磁気センサ、加速度センサとの通信処理、姿勢の算出を別のRTCに分離した方が良かったかもしれません。それで姿勢をOutPortから出力するようにしておいた方が再利用性があったかもしれません。
今後変更するかもしれないです。
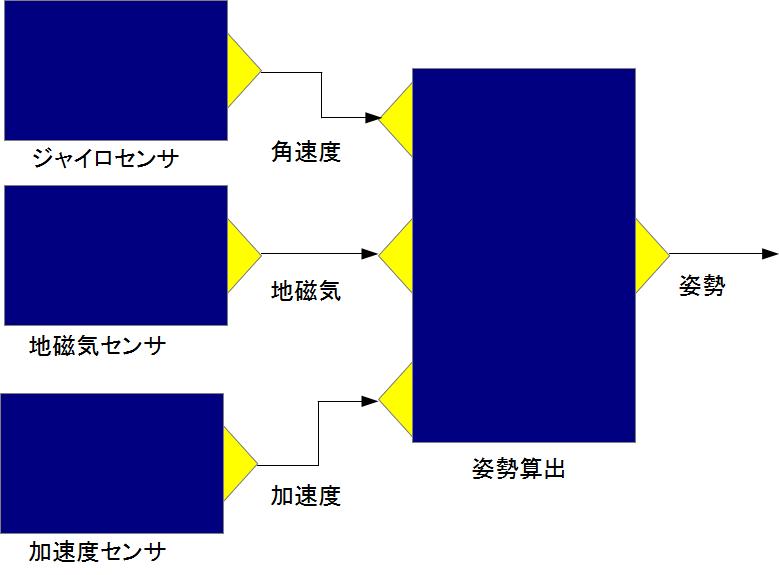
ただ、センサごとにRTCを作るのは前から言っているように間違いだと思っています。
今回の場合だと姿勢の計算まで含めるべきですし、その計算に必要なセンサ(今回の場合ジャイロセンサ、地磁気センサ、加速度センサ)の計測値取得は単一のRTCで処理すべきだとは思います。
つまりこれは間違いです。
この4つのRTCは単一のRTCで実装するべきです。
一見各センサの置き換えが容易になりそうな感じに見えますが、このシステムを作るのに手間がかかるので反って面倒になります。
RTCの数が増えれば増えるほど他の人がそのシステムを理解するのが困難になるので、細分化しすぎには注意してください。
一応Edisonで制御するロボットを作ってみたわけですが、今の所Edisonの値段の高さに見合うほど有効な使い方ができていないと思っています。
単純にモーター制御とかしたいだけならAVRみたいな8bitマイコンを使えば良いですし、マニピュレータの制御とか複雑な計算が絡んできたらSH2みたいな32bitマイコンを使えば良いと思うので個人で使う分にはシングルボードコンピュータは手に余ると思います。
Linuxが動作するので通常のPCで動作しているソフトウェアが使えたり、Pythonとかでプログラミングができたりメリットはあるけど、あまり有効には使えていませんからね。
まあこれからEdisonで動作するRTCを増やしたり、他の人の作成したRTCを使ってみたりする中で何らかのメリットを見出せるかもしれないので試行錯誤してみます。
あまり関係ないけど、どのような処理の時に8bitマイコンを使うか、32bitマイコンを使うかあまり理解していなかったので調べてみました。 このサイトなんか参考になるかなと思ったのですが、どうにもATmega168Pの結果が怪しいです。こちらでもSH7144FとATmega168Pで調べてみたのですが、SH7144Fは似たような結果になりましたがATmega168Pは行列計算(float)の計算が10msぐらいだったので大きく違う結果になりました。 8倍ぐらい違うと言う事は発振クロックを8分周にしているからこうなっているのかもしれません。
それにしてもSH7144Fは50MHzの32bitで、ATmega168Pは20MHzの8bitなんだからもっと差が開きそうですが4~5倍ぐらいの差しかないのですからどこで使い分けるかは微妙ですね。
ATmega168Pでも3自由度マニピュレータの手先位置制御ぐらいならできるかもしれないです。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

今後変更するかもしれないです。
ただ、センサごとにRTCを作るのは前から言っているように間違いだと思っています。
今回の場合だと姿勢の計算まで含めるべきですし、その計算に必要なセンサ(今回の場合ジャイロセンサ、地磁気センサ、加速度センサ)の計測値取得は単一のRTCで処理すべきだとは思います。
つまりこれは間違いです。
この4つのRTCは単一のRTCで実装するべきです。
一見各センサの置き換えが容易になりそうな感じに見えますが、このシステムを作るのに手間がかかるので反って面倒になります。
RTCの数が増えれば増えるほど他の人がそのシステムを理解するのが困難になるので、細分化しすぎには注意してください。
一応Edisonで制御するロボットを作ってみたわけですが、今の所Edisonの値段の高さに見合うほど有効な使い方ができていないと思っています。
単純にモーター制御とかしたいだけならAVRみたいな8bitマイコンを使えば良いですし、マニピュレータの制御とか複雑な計算が絡んできたらSH2みたいな32bitマイコンを使えば良いと思うので個人で使う分にはシングルボードコンピュータは手に余ると思います。
Linuxが動作するので通常のPCで動作しているソフトウェアが使えたり、Pythonとかでプログラミングができたりメリットはあるけど、あまり有効には使えていませんからね。
まあこれからEdisonで動作するRTCを増やしたり、他の人の作成したRTCを使ってみたりする中で何らかのメリットを見出せるかもしれないので試行錯誤してみます。
あまり関係ないけど、どのような処理の時に8bitマイコンを使うか、32bitマイコンを使うかあまり理解していなかったので調べてみました。 このサイトなんか参考になるかなと思ったのですが、どうにもATmega168Pの結果が怪しいです。こちらでもSH7144FとATmega168Pで調べてみたのですが、SH7144Fは似たような結果になりましたがATmega168Pは行列計算(float)の計算が10msぐらいだったので大きく違う結果になりました。 8倍ぐらい違うと言う事は発振クロックを8分周にしているからこうなっているのかもしれません。
それにしてもSH7144Fは50MHzの32bitで、ATmega168Pは20MHzの8bitなんだからもっと差が開きそうですが4~5倍ぐらいの差しかないのですからどこで使い分けるかは微妙ですね。
ATmega168Pでも3自由度マニピュレータの手先位置制御ぐらいならできるかもしれないです。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする