ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
この前の記事で,「他のPCのコンポーネントと通信する場合はVMware Network Adapterを無効にした方がいいよ」と書きましたが,無効にする必要ないです.
東北学院大学の熊谷先生のサイトに詳しい解説が載ってあったのでそれを参考にしたほうが良さそうです.
・・・・しかし,あのサイトは2年ぐらい前から参考にさせて貰ってるのですがRTMの解説が載ってるのは今はじめて知りました.
とりあえず,OpenRTM-aistのサイト以外でRTMの解説をしているサイトを書いときます.(リンク消して欲しい場合はコメント欄に書いてください.すぐに消します.)
ysuga.net
けんちょの部屋
ロボット開発工学
RTミドルウェア入門
@ホームに参加するぞのページ
他にありましたら,コメント欄に書いて頂けると助かります.
東北学院大学の熊谷先生のサイトに詳しい解説が載ってあったのでそれを参考にしたほうが良さそうです.
・・・・しかし,あのサイトは2年ぐらい前から参考にさせて貰ってるのですがRTMの解説が載ってるのは今はじめて知りました.
とりあえず,OpenRTM-aistのサイト以外でRTMの解説をしているサイトを書いときます.(リンク消して欲しい場合はコメント欄に書いてください.すぐに消します.)
ysuga.net
けんちょの部屋
ロボット開発工学
RTミドルウェア入門
@ホームに参加するぞのページ
他にありましたら,コメント欄に書いて頂けると助かります.
PR
・・・・こんな躓き方してるの僕だけなんだろうなぁと思いつつ前回の続きです。
とりあえず、Ubuntu-10.04をフルインストールして、そこにRTMをインストールしてみました。
・・・・インストールの時点で、
E: パッケージ libomniorb4 が見つかりません
とか出る。
・・・そういえば、Wubiでインストールしたときも出てたような記憶が頭をよぎりましたがとりあえずスルーしてやってみます。
予想通りネームサーバーに登録されやがりません。
3時間ぐらい考えてると、物凄いアホなミスに気がつきました。
OpenRTM-aistのサイトの動作確認のところで、RTCworkというフォルダを作ってそこにrtc.conf を作成し配置してくださいよと書いてあったので、作りました。
で、コンポーネントを起動するときに、
/usr/share/OpenRTM-aist/examps/ConsoleOutComp -f ~/RTCWork/rtc.conf
・・・いや、Wubiでやってた時はちゃんと名前はあってたはずなので別の原因だと思いますよ?
ちゃんと他のWindowsのPCで起動したコンポーネントとも通信できました。
恥ずかしいのでもう言い訳はしません。
今日のところはこれぐらいにしといてあげます。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
とりあえず、Ubuntu-10.04をフルインストールして、そこにRTMをインストールしてみました。
・・・・インストールの時点で、
E: パッケージ libomniorb4 が見つかりません
とか出る。
・・・そういえば、Wubiでインストールしたときも出てたような記憶が頭をよぎりましたがとりあえずスルーしてやってみます。
予想通りネームサーバーに登録されやがりません。
3時間ぐらい考えてると、物凄いアホなミスに気がつきました。
OpenRTM-aistのサイトの動作確認のところで、RTCworkというフォルダを作ってそこにrtc.conf を作成し配置してくださいよと書いてあったので、作りました。
で、コンポーネントを起動するときに、
/usr/share/OpenRTM-aist/examps/ConsoleOutComp -f ~/RTCWork/rtc.conf
・・・いや、Wubiでやってた時はちゃんと名前はあってたはずなので別の原因だと思いますよ?
ちゃんと他のWindowsのPCで起動したコンポーネントとも通信できました。
恥ずかしいのでもう言い訳はしません。
今日のところはこれぐらいにしといてあげます。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
今回は単なるメモ・・・・と言うか僕以外にこんな事態になるかどうかは分かりませんが注意事項的なメモです.
かなり前に,VMware PlayerでUbuntuを使いましたが,他のPCのコンポーネントと通信する場合はVMware Network Adapterが有効になっていると相手のPCにコンポーネントが死んだ状態で出てくるみたいなので,無効にしておいた方が良さそうです.
VMware Player上で起動したLinuxと他のPCとの通信の方法はわからないので,他を当たってください.
あと何故かどこにも書いてないのですが,他のPCのネームサーバーにコンポーネントを追加したい場合は,
corba.nameservers: localhost:2809
とかなってるのを,
corba.nameservers: IPアドレス:2809
とするだけでとりあえずはできます.
IPアドレスはコマンドプロンプトでipconfigと入力すればわかります.
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
かなり前に,VMware PlayerでUbuntuを使いましたが,他のPCのコンポーネントと通信する場合はVMware Network Adapterが有効になっていると相手のPCにコンポーネントが死んだ状態で出てくるみたいなので,無効にしておいた方が良さそうです.
VMware Player上で起動したLinuxと他のPCとの通信の方法はわからないので,他を当たってください.
あと何故かどこにも書いてないのですが,他のPCのネームサーバーにコンポーネントを追加したい場合は,
corba.nameservers: localhost:2809
とかなってるのを,
corba.nameservers: IPアドレス:2809
とするだけでとりあえずはできます.
IPアドレスはコマンドプロンプトでipconfigと入力すればわかります.
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
スリムで軽快、人型ロボット=家庭や職場への導入実験台-産総研と川田工業が開発(記事ドットコム)
陸上選手のようにスリムな人間型二足歩行ロボットを開発したと、産業技術総合研究所(茨城県つくば市)と川田工業機械システム事業部(栃木県芳賀町)が 15日発表した。国内外の大学・研究機関で、人間と協力して家庭で高齢者介護や家事を行ったり、職場で多様な作業をこなしたりするロボットの開発が進んで おり、その実験台として来年1月から1体2600万円で販売する。
この「HRP-4」は、身長151センチ、体重39キロ(バッテリー含む) で、白と青の軽快なデザイン。背中にパソコンを搭載できる。2003年販売開始の「HRP-2」に比べ、身長はほぼ同じだが、体重は構造を簡素化して58 キロから3割減量。価格も1体3800万円から3割ダウンした。モーターで動く関節の軸数は30から34に増え、動きがより滑らかになった。
技術の一部は、産総研が昨年3月発表し、ファッションショーなどで「女性ロボットタレント」として活躍している「HRP-4C」に既に生かされている。
川田工業の担当者によると、HRP-2はこれまでに約20体売れた。新型は年3~5体の販売を見込む。以前は土木・建設工事現場での作業も用途に考えられ たが、大幅なコストダウンや耐久性の向上が難しいと判明。二足歩行の長所が最も発揮されるのは、階段や段差があり、家具も多い家庭内だという。
1体2600万円・・・・
残念ながらうちの研究室では買えそうにありませんな.30万ぐらいなら
しかし,体重39キロって,ドラえもんが129.3キロとか言ってるのが馬鹿らしくなる数字ですね.
産総研のサイトを見てみると,
OpenRTM-aistの採用で、国内外のソフトウエア資産が利用可能となり研究効率が向上
と書いてますね.
今のところ,研究効率が向上するかは微妙ですが.
少しマイナーな感じですしね.
RTミドルウェアコンテストのページなんか見てみると,
● 既にSI2010の申込みページからは登録出来ません。登録が間に合わなかった参加希望者の方は、諦めずに大至急、神徳(RTMcontest2010@m.aist.go.jp)まで連絡お願い致します。
とか書いてますしね.
・・・・そんなに参加者が少ないのか,それともその他に事情があるのかどうかはわかりませんが太字で「諦めずに大至急」とか書いてますので,参加可能な人は今からでも間に合いそうです.
でないと,去年みたいに表彰委員長が出陣みたいな事態になるかも.
だいぶ前の記事に書いたことですけど,WubiでインストールしたUbuntuでRTMが動作しないとか言う話で,コメント欄に「今度もう一回wubiでインストールして試してみようと思います.」とか書いときながらこのブログで全く結果を書いてなかったのでお知らせしときます.
Ubuntu-9.10でもう一回やってもやっぱり無理で,10.04でやっても無理だったので,フルインストールすることをお勧めします.原因はわからんけど.
OpenRTPのサイトでOpenRT Platformインストール済みのUbuntu-10.04LTSのLiveDVDイメージがあるみたいなのでこれを使ってみてはいかがでしょうか?
いちいち話が飛びますが,ロボティクスシンポジアの講演申し込み締め切りが今月の27日までです.
これを逃すと,ロボットの国内の講演会の申し込みは1月のROBOMECまでありません.
自律分散システムシンポジウムの申し込み締め切りが10月末にあったりするけど,僕は関係ないなぁ.
ロボティクスシンポジアに蛇型ロボットの研究を出す気満々だったんだけど,申し込み締め切り直前まで先生が出張しているので出せそうにありません.
そもそも今の時点でかなり理論が怪しいしね・・・・・・
ROBOMECには出したいですが,来年の5月末で発表する頃にはかなり古くなってるので,締め切り延びろと祈るしかありません.
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
陸上選手のようにスリムな人間型二足歩行ロボットを開発したと、産業技術総合研究所(茨城県つくば市)と川田工業機械システム事業部(栃木県芳賀町)が 15日発表した。国内外の大学・研究機関で、人間と協力して家庭で高齢者介護や家事を行ったり、職場で多様な作業をこなしたりするロボットの開発が進んで おり、その実験台として来年1月から1体2600万円で販売する。
この「HRP-4」は、身長151センチ、体重39キロ(バッテリー含む) で、白と青の軽快なデザイン。背中にパソコンを搭載できる。2003年販売開始の「HRP-2」に比べ、身長はほぼ同じだが、体重は構造を簡素化して58 キロから3割減量。価格も1体3800万円から3割ダウンした。モーターで動く関節の軸数は30から34に増え、動きがより滑らかになった。
技術の一部は、産総研が昨年3月発表し、ファッションショーなどで「女性ロボットタレント」として活躍している「HRP-4C」に既に生かされている。
川田工業の担当者によると、HRP-2はこれまでに約20体売れた。新型は年3~5体の販売を見込む。以前は土木・建設工事現場での作業も用途に考えられ たが、大幅なコストダウンや耐久性の向上が難しいと判明。二足歩行の長所が最も発揮されるのは、階段や段差があり、家具も多い家庭内だという。
1体2600万円・・・・
残念ながらうちの研究室では買えそうにありませんな.
しかし,体重39キロって,ドラえもんが129.3キロとか言ってるのが馬鹿らしくなる数字ですね.
産総研のサイトを見てみると,
OpenRTM-aistの採用で、国内外のソフトウエア資産が利用可能となり研究効率が向上
と書いてますね.
今のところ,研究効率が向上するかは微妙ですが.
少しマイナーな感じですしね.
RTミドルウェアコンテストのページなんか見てみると,
● 既にSI2010の申込みページからは登録出来ません。登録が間に合わなかった参加希望者の方は、諦めずに大至急、神徳(RTMcontest2010@m.aist.go.jp)まで連絡お願い致します。
とか書いてますしね.
・・・・そんなに参加者が少ないのか,それともその他に事情があるのかどうかはわかりませんが太字で「諦めずに大至急」とか書いてますので,参加可能な人は今からでも間に合いそうです.
でないと,去年みたいに表彰委員長が出陣みたいな事態になるかも.
だいぶ前の記事に書いたことですけど,WubiでインストールしたUbuntuでRTMが動作しないとか言う話で,コメント欄に「今度もう一回wubiでインストールして試してみようと思います.」とか書いときながらこのブログで全く結果を書いてなかったのでお知らせしときます.
Ubuntu-9.10でもう一回やってもやっぱり無理で,10.04でやっても無理だったので,フルインストールすることをお勧めします.原因はわからんけど.
OpenRTPのサイトでOpenRT Platformインストール済みのUbuntu-10.04LTSのLiveDVDイメージがあるみたいなのでこれを使ってみてはいかがでしょうか?
いちいち話が飛びますが,ロボティクスシンポジアの講演申し込み締め切りが今月の27日までです.
これを逃すと,ロボットの国内の講演会の申し込みは1月のROBOMECまでありません.
自律分散システムシンポジウムの申し込み締め切りが10月末にあったりするけど,僕は関係ないなぁ.
ロボティクスシンポジアに蛇型ロボットの研究を出す気満々だったんだけど,申し込み締め切り直前まで先生が出張しているので出せそうにありません.
そもそも今の時点でかなり理論が怪しいしね・・・・・・
ROBOMECには出したいですが,来年の5月末で発表する頃にはかなり古くなってるので,締め切り延びろと祈るしかありません.
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
前回の続きですが,今回は蛇型ロボットをCPG(Central Pattern Generator)で制御します.
前回の蛇行運動とあまり差がないように見えますが,アルゴリズムは全く違います.
解説したいところですが,僕は蛇型ロボットの研究はやってますがCPGには全く関係ないので,適当克ついいかげんに解説します.
CPGは生物規範型の制御方法です.
身体知システム論―ヒューマンロボティクスによる運動の学習と制御(伊藤宏,共立出版,2005)によると,
「動物は,運動器官に対して1対1の神経回路をもちつつ,同時に,それらが密接に結合されている」
らしく,ロボットの制御に用いる場合,筋肉がそれぞれニューロンをもっており,それらが相互抑制し合う回路となります.
この論文のFig.4がわかりやすいかと思います.
実際のロボットは,筋肉ではなく,回転モータで駆動される場合が多いので,伸筋と屈筋のニューロンの出力の差を回転角度としてやります.
実際の式としては,以下のようになります.
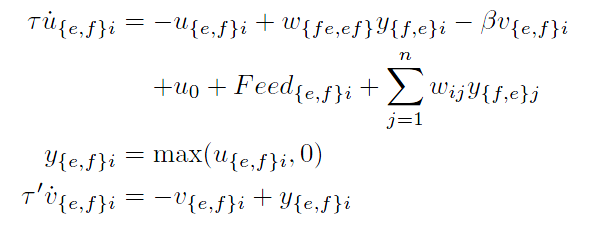
ここで,y{e,f}iがニューロンの状態です.
v{e,f}iは疲労で,w{fe,ef}は伸筋,屈筋間の結合係数,wijはそれ以外の結合係数,u0は持続性入力,Feedはセンサからのフィードバック信号です.
蛇の場合は,伸筋と屈筋の間で相互抑制するのは他と同じですが,1つ後ろの関節のニューロンと結合しており,ここは相互抑制ではなく,一方的に後ろに信号を送るだけです.
さらに,今回は一番前の関節から4番目の関節へも結合しています.
こうしないと,なぜかうまくいきません.
蛇型ロボットのCPGによる制御としては発展型としてCubic CPG,循環抑制型CPGネットワーク等があります.
参考文献
[1]伊藤宏,身体知システム論―ヒューマンロボティクスによる運動の学習と制御,共立出版,2005
[2] 稲田博信,石井和男,CPG を用いた2 足歩行ロボットの3 次元歩行シミュレーション,http://www.brain.kyutech.ac.jp/~ishii/Paper/2002/2002_RSJ_Inada.pdf#search=%27CPG%20%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%202%20%E8%B6%B3%E6%AD%A9%E8%A1%8C%E3%83%AD%E3%83%9C%E3%83%83%E3%83%88%E3%81%AE%203%20%E6%AC%A1%E5%85%83%E6%AD%A9%E8%A1%8C%E3%82%B7%E3%83%9F%E3%83%A5%E3%83%AC%E3%83%BC%E3%82%B7%E3%83%A7%E3%83%B3%27
[3]Xiaodong Wu,Shugen Ma,CPG-based control of serpentine locomotion of a snake-like robot,Mechatronics 20 (2010) 326–334
[4]Chaoquan Tang, Shugen Ma, A Cubic CPG Model for Snake-like Robot to Adapt to Environment,International Conference on Information and Automation June 20 - 23, Harbin, China
[5]佐藤 智紀 , 馬 書根 , 井上 康介, 蛇型ロボットの自律分散制御システムの開発, ロボティクス・メカトロニクス講演会講演概要集 2005, 96, 2005-06-09
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
前回の蛇行運動とあまり差がないように見えますが,アルゴリズムは全く違います.
解説したいところですが,僕は蛇型ロボットの研究はやってますがCPGには全く関係ないので,適当克ついいかげんに解説します.
CPGは生物規範型の制御方法です.
身体知システム論―ヒューマンロボティクスによる運動の学習と制御(伊藤宏,共立出版,2005)によると,
「動物は,運動器官に対して1対1の神経回路をもちつつ,同時に,それらが密接に結合されている」
らしく,ロボットの制御に用いる場合,筋肉がそれぞれニューロンをもっており,それらが相互抑制し合う回路となります.
この論文のFig.4がわかりやすいかと思います.
実際のロボットは,筋肉ではなく,回転モータで駆動される場合が多いので,伸筋と屈筋のニューロンの出力の差を回転角度としてやります.
実際の式としては,以下のようになります.
ここで,y{e,f}iがニューロンの状態です.
v{e,f}iは疲労で,w{fe,ef}は伸筋,屈筋間の結合係数,wijはそれ以外の結合係数,u0は持続性入力,Feedはセンサからのフィードバック信号です.
蛇の場合は,伸筋と屈筋の間で相互抑制するのは他と同じですが,1つ後ろの関節のニューロンと結合しており,ここは相互抑制ではなく,一方的に後ろに信号を送るだけです.
さらに,今回は一番前の関節から4番目の関節へも結合しています.
こうしないと,なぜかうまくいきません.
蛇型ロボットのCPGによる制御としては発展型としてCubic CPG,循環抑制型CPGネットワーク等があります.
参考文献
[1]伊藤宏,身体知システム論―ヒューマンロボティクスによる運動の学習と制御,共立出版,2005
[2] 稲田博信,石井和男,CPG を用いた2 足歩行ロボットの3 次元歩行シミュレーション,http://www.brain.kyutech.ac.jp/~ishii/Paper/2002/2002_RSJ_Inada.pdf#search=%27CPG%20%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%202%20%E8%B6%B3%E6%AD%A9%E8%A1%8C%E3%83%AD%E3%83%9C%E3%83%83%E3%83%88%E3%81%AE%203%20%E6%AC%A1%E5%85%83%E6%AD%A9%E8%A1%8C%E3%82%B7%E3%83%9F%E3%83%A5%E3%83%AC%E3%83%BC%E3%82%B7%E3%83%A7%E3%83%B3%27
[3]Xiaodong Wu,Shugen Ma,CPG-based control of serpentine locomotion of a snake-like robot,Mechatronics 20 (2010) 326–334
[4]Chaoquan Tang, Shugen Ma, A Cubic CPG Model for Snake-like Robot to Adapt to Environment,International Conference on Information and Automation June 20 - 23, Harbin, China
[5]佐藤 智紀 , 馬 書根 , 井上 康介, 蛇型ロボットの自律分散制御システムの開発, ロボティクス・メカトロニクス講演会講演概要集 2005, 96, 2005-06-09
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・