ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
前回の続きですが,今回は蛇型ロボットをCPG(Central Pattern Generator)で制御します.
前回の蛇行運動とあまり差がないように見えますが,アルゴリズムは全く違います.
解説したいところですが,僕は蛇型ロボットの研究はやってますがCPGには全く関係ないので,適当克ついいかげんに解説します.
CPGは生物規範型の制御方法です.
身体知システム論―ヒューマンロボティクスによる運動の学習と制御(伊藤宏,共立出版,2005)によると,
「動物は,運動器官に対して1対1の神経回路をもちつつ,同時に,それらが密接に結合されている」
らしく,ロボットの制御に用いる場合,筋肉がそれぞれニューロンをもっており,それらが相互抑制し合う回路となります.
この論文のFig.4がわかりやすいかと思います.
実際のロボットは,筋肉ではなく,回転モータで駆動される場合が多いので,伸筋と屈筋のニューロンの出力の差を回転角度としてやります.
実際の式としては,以下のようになります.
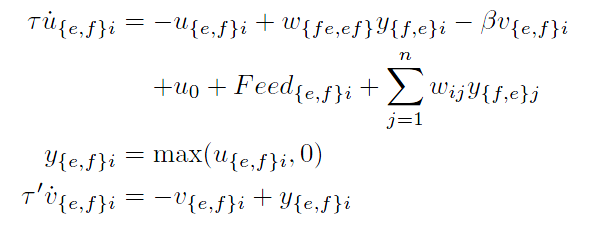
ここで,y{e,f}iがニューロンの状態です.
v{e,f}iは疲労で,w{fe,ef}は伸筋,屈筋間の結合係数,wijはそれ以外の結合係数,u0は持続性入力,Feedはセンサからのフィードバック信号です.
蛇の場合は,伸筋と屈筋の間で相互抑制するのは他と同じですが,1つ後ろの関節のニューロンと結合しており,ここは相互抑制ではなく,一方的に後ろに信号を送るだけです.
さらに,今回は一番前の関節から4番目の関節へも結合しています.
こうしないと,なぜかうまくいきません.
蛇型ロボットのCPGによる制御としては発展型としてCubic CPG,循環抑制型CPGネットワーク等があります.
参考文献
[1]伊藤宏,身体知システム論―ヒューマンロボティクスによる運動の学習と制御,共立出版,2005
[2] 稲田博信,石井和男,CPG を用いた2 足歩行ロボットの3 次元歩行シミュレーション,http://www.brain.kyutech.ac.jp/~ishii/Paper/2002/2002_RSJ_Inada.pdf#search=%27CPG%20%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%202%20%E8%B6%B3%E6%AD%A9%E8%A1%8C%E3%83%AD%E3%83%9C%E3%83%83%E3%83%88%E3%81%AE%203%20%E6%AC%A1%E5%85%83%E6%AD%A9%E8%A1%8C%E3%82%B7%E3%83%9F%E3%83%A5%E3%83%AC%E3%83%BC%E3%82%B7%E3%83%A7%E3%83%B3%27
[3]Xiaodong Wu,Shugen Ma,CPG-based control of serpentine locomotion of a snake-like robot,Mechatronics 20 (2010) 326–334
[4]Chaoquan Tang, Shugen Ma, A Cubic CPG Model for Snake-like Robot to Adapt to Environment,International Conference on Information and Automation June 20 - 23, Harbin, China
[5]佐藤 智紀 , 馬 書根 , 井上 康介, 蛇型ロボットの自律分散制御システムの開発, ロボティクス・メカトロニクス講演会講演概要集 2005, 96, 2005-06-09

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
前回の蛇行運動とあまり差がないように見えますが,アルゴリズムは全く違います.
解説したいところですが,僕は蛇型ロボットの研究はやってますがCPGには全く関係ないので,適当克ついいかげんに解説します.
CPGは生物規範型の制御方法です.
身体知システム論―ヒューマンロボティクスによる運動の学習と制御(伊藤宏,共立出版,2005)によると,
「動物は,運動器官に対して1対1の神経回路をもちつつ,同時に,それらが密接に結合されている」
らしく,ロボットの制御に用いる場合,筋肉がそれぞれニューロンをもっており,それらが相互抑制し合う回路となります.
この論文のFig.4がわかりやすいかと思います.
実際のロボットは,筋肉ではなく,回転モータで駆動される場合が多いので,伸筋と屈筋のニューロンの出力の差を回転角度としてやります.
実際の式としては,以下のようになります.
ここで,y{e,f}iがニューロンの状態です.
v{e,f}iは疲労で,w{fe,ef}は伸筋,屈筋間の結合係数,wijはそれ以外の結合係数,u0は持続性入力,Feedはセンサからのフィードバック信号です.
蛇の場合は,伸筋と屈筋の間で相互抑制するのは他と同じですが,1つ後ろの関節のニューロンと結合しており,ここは相互抑制ではなく,一方的に後ろに信号を送るだけです.
さらに,今回は一番前の関節から4番目の関節へも結合しています.
こうしないと,なぜかうまくいきません.
蛇型ロボットのCPGによる制御としては発展型としてCubic CPG,循環抑制型CPGネットワーク等があります.
参考文献
[1]伊藤宏,身体知システム論―ヒューマンロボティクスによる運動の学習と制御,共立出版,2005
[2] 稲田博信,石井和男,CPG を用いた2 足歩行ロボットの3 次元歩行シミュレーション,http://www.brain.kyutech.ac.jp/~ishii/Paper/2002/2002_RSJ_Inada.pdf#search=%27CPG%20%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%202%20%E8%B6%B3%E6%AD%A9%E8%A1%8C%E3%83%AD%E3%83%9C%E3%83%83%E3%83%88%E3%81%AE%203%20%E6%AC%A1%E5%85%83%E6%AD%A9%E8%A1%8C%E3%82%B7%E3%83%9F%E3%83%A5%E3%83%AC%E3%83%BC%E3%82%B7%E3%83%A7%E3%83%B3%27
[3]Xiaodong Wu,Shugen Ma,CPG-based control of serpentine locomotion of a snake-like robot,Mechatronics 20 (2010) 326–334
[4]Chaoquan Tang, Shugen Ma, A Cubic CPG Model for Snake-like Robot to Adapt to Environment,International Conference on Information and Automation June 20 - 23, Harbin, China
[5]佐藤 智紀 , 馬 書根 , 井上 康介, 蛇型ロボットの自律分散制御システムの開発, ロボティクス・メカトロニクス講演会講演概要集 2005, 96, 2005-06-09
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする