ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
書くことないなあ。
仕方ないのでUMLの話でもします。
僕もよくわからないのでUMLとRTミドルウェアによるモデルベースロボットシステム開発を読みながら書きます。
まずは、このページからastah* communityをダウンロードしてください。
最初はアクティビティ図から作ってみます。
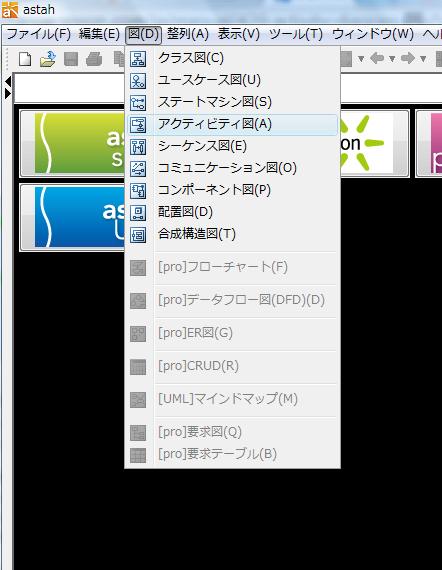
図→アクティビティ図を選択してください。
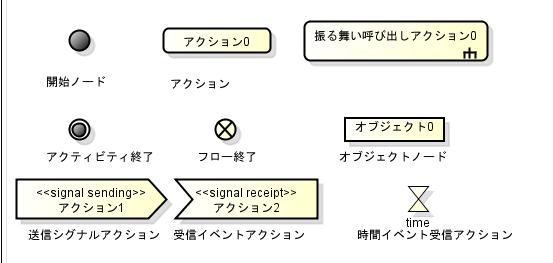
とりあえず使いそうな要素を並べてみました。
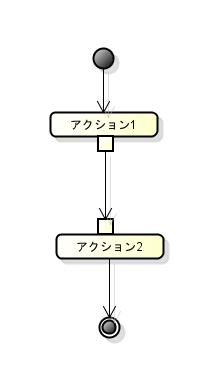
とりあえず、簡単なアクティビティ図を作ってみました。
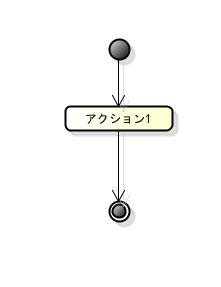
開始後アクション1の処理を実行して終了します。
正直矢印の見ためが同じなので区別しづらいのですが、上の図のように矢印が処理の流れを表現する場合はコントロールフロー、以下のようにオブジェクトノードによりデータやオブジェクトをやり取りする場合はオブジェクトフローと呼ぶようです。
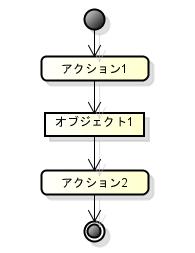
さらにピンを使用した場合もデータ等をやりとりするオブジェクトフローになります。
フォークノード、ジョインノードにより複数の処理への分岐、統合を記述できます。
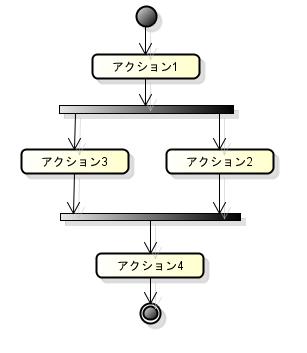
この場合、アクション1の実行後、並列にアクション2、アクション3を実行、その後アクション4を実行します。
アクティビティ終了ノードとフロー終了ノードの違いが分かりづらいのですが、分岐した全てのフローが終了する場合はアクティビティ終了ノード、到達したフローのみが終了する場合はフロー終了ノードを使用するらしいです。
以下のようにまずフォークノードによりアクション3とアクション2にフローが分岐、アクション2を実行後デシジョンノードによりデシジョンノードによりアクティビティ終了ノードとフロー終了ノードに条件分岐する場合を考えてみます。
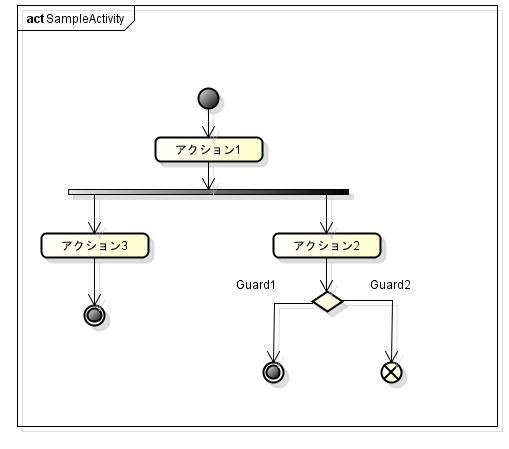
アクティビティ終了ノードに分岐した場合、アクション3に分岐したフローも含めて全てのフローが終了します。
一方フロー終了ノードに分岐した場合、アクション3に分岐したノードはそのまま処理が継続されます。
今日はこのぐらいにしておきます。
明日はクラス図をやります。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

仕方ないのでUMLの話でもします。
僕もよくわからないのでUMLとRTミドルウェアによるモデルベースロボットシステム開発を読みながら書きます。
まずは、このページからastah* communityをダウンロードしてください。
最初はアクティビティ図から作ってみます。
図→アクティビティ図を選択してください。
とりあえず使いそうな要素を並べてみました。
とりあえず、簡単なアクティビティ図を作ってみました。
開始後アクション1の処理を実行して終了します。
正直矢印の見ためが同じなので区別しづらいのですが、上の図のように矢印が処理の流れを表現する場合はコントロールフロー、以下のようにオブジェクトノードによりデータやオブジェクトをやり取りする場合はオブジェクトフローと呼ぶようです。
さらにピンを使用した場合もデータ等をやりとりするオブジェクトフローになります。
フォークノード、ジョインノードにより複数の処理への分岐、統合を記述できます。
この場合、アクション1の実行後、並列にアクション2、アクション3を実行、その後アクション4を実行します。
アクティビティ終了ノードとフロー終了ノードの違いが分かりづらいのですが、分岐した全てのフローが終了する場合はアクティビティ終了ノード、到達したフローのみが終了する場合はフロー終了ノードを使用するらしいです。
以下のようにまずフォークノードによりアクション3とアクション2にフローが分岐、アクション2を実行後デシジョンノードによりデシジョンノードによりアクティビティ終了ノードとフロー終了ノードに条件分岐する場合を考えてみます。
アクティビティ終了ノードに分岐した場合、アクション3に分岐したフローも含めて全てのフローが終了します。
一方フロー終了ノードに分岐した場合、アクション3に分岐したノードはそのまま処理が継続されます。
今日はこのぐらいにしておきます。
明日はクラス図をやります。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする