ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
自分で面白かもしれないと思った事を調べてみたところ、既に誰かがやっていたと分かるとがっかりしますね。常識の斜め上を行ったつもりだったのですが、さらに上をいく変態がいたとは思いませんでした。恥ずかしいので何をやろうとしていたかは言いませんけど。
それはさておき、今回は配置図の話をします。
astah* communityを起動して図→配置図を選択してください。
まずは適当にノードを追加してみます。

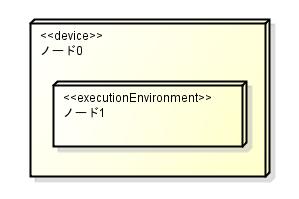
ステレオタイプがdeviceの場合はハードウェアデバイス、executionEnvironmentの場合は実行環境を表現しているとからしいです。
以下のように階層構造にすることもできるとからしいです。
成果物という要素を追加できるとからしいですが、astah* communityで追加する方法がわかりません。
関連ボタンを選択後、ノードを選択するとコミュニケーションパスが追加できます。
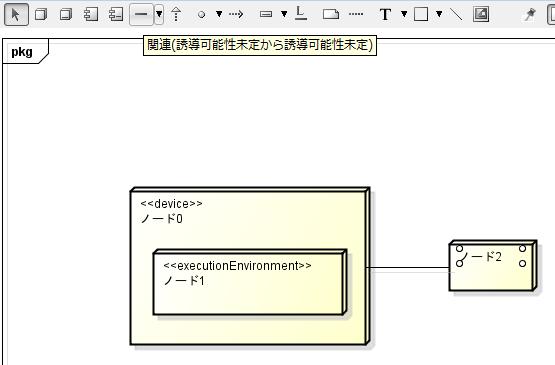
方向が決まっている場合は以下のように矢印を表記しても良いとからしいです。
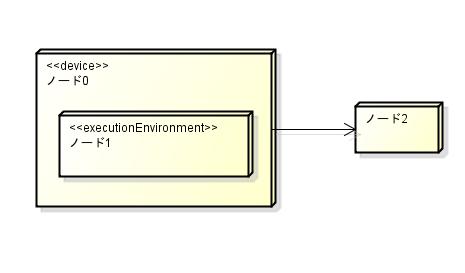
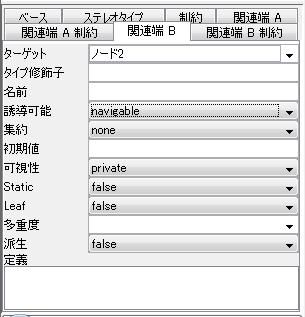
矢印は左下のウィジェットから関連端AかBのタブを開いて誘導可能をnavigateに設定すれば付加されます。
今日もあまり書くことがなさそうなのでコメントの付け方も書いておきます。
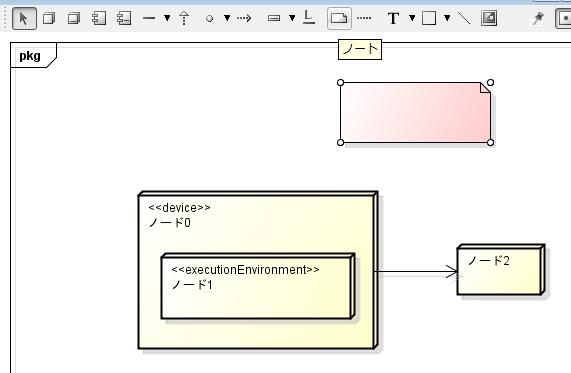
まずノートボタンを選択後、ノートを適当なところに配置してください。
それからノートから図要素へのアンカーボタンを選択してノートと注釈を記述したいオブジェクトを選択してください。
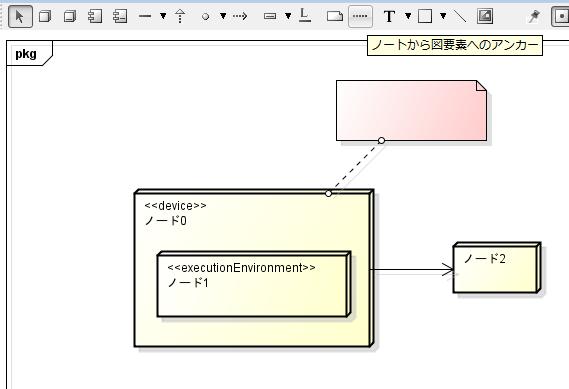
あとはノートに注釈を書くだけです。
今日はこのぐらいにしておきます。
明日はユースケース図をやります。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

それはさておき、今回は配置図の話をします。
astah* communityを起動して図→配置図を選択してください。
まずは適当にノードを追加してみます。
ステレオタイプがdeviceの場合はハードウェアデバイス、executionEnvironmentの場合は実行環境を表現しているとからしいです。
以下のように階層構造にすることもできるとからしいです。
成果物という要素を追加できるとからしいですが、astah* communityで追加する方法がわかりません。
関連ボタンを選択後、ノードを選択するとコミュニケーションパスが追加できます。
方向が決まっている場合は以下のように矢印を表記しても良いとからしいです。
矢印は左下のウィジェットから関連端AかBのタブを開いて誘導可能をnavigateに設定すれば付加されます。
今日もあまり書くことがなさそうなのでコメントの付け方も書いておきます。
まずノートボタンを選択後、ノートを適当なところに配置してください。
それからノートから図要素へのアンカーボタンを選択してノートと注釈を記述したいオブジェクトを選択してください。
あとはノートに注釈を書くだけです。
今日はこのぐらいにしておきます。
明日はユースケース図をやります。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする