ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
CORBAについて調べていたのですが、この資料がとても参考になりました。
皆さんもCORBAを実装する際は参考にしてみてはいかがでしょうか?
どうにもCORBAが僕みたいな素人には理解しづらい原因として、仕組み以前に用語の意味がよくわからないということがあると思います。
例えば以下の用語です。
まあでも自分でRTミドルウェアを実装するにしても既存のCORBA実装を使えば十分な事も多いと思うので、このブログを見てる人でCORBAから実装しようとか考えている人はいないかもしれないですけど。
それはさておき、今回はユースケース図の話をします。
astah* communityを起動して図→ユースケース図を選択してください。
とりあえず適当にアクターとユースケースを追加してみます。
アクターはシステムを利用するユーザー等の外部に存在するもの、ユースケースはアクターがシステムを使ってできる事を表現しているとかそうではないとからしいです。
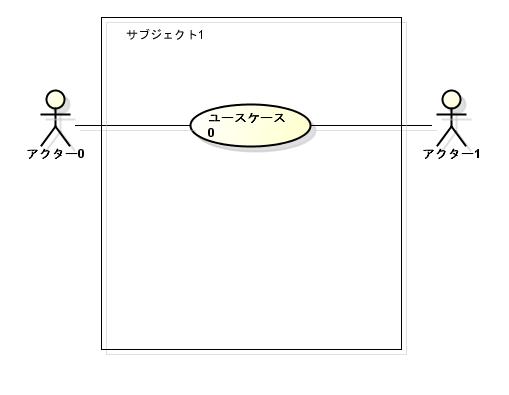
通常は以下のように作成したシステムはサブジェクトという四角形で囲むらしいのですが、作成するボタンが見つからなかったため長方形とテキストで形だけ作っています。
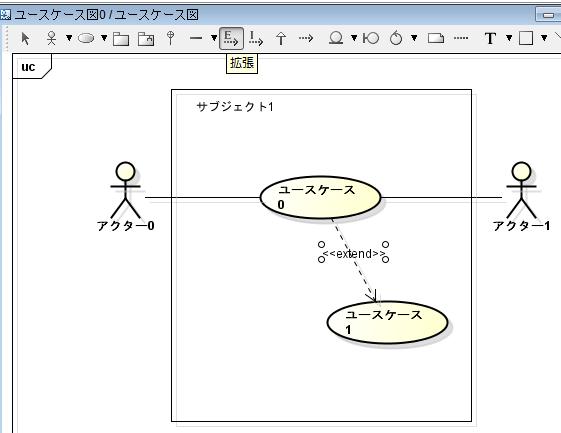
拡張ボタンを選択後、ユースケースを選択すると拡張を表現できます。
以下の場合ユースケース0がユースケース1に機能を追加するという意味になるとからしいです。
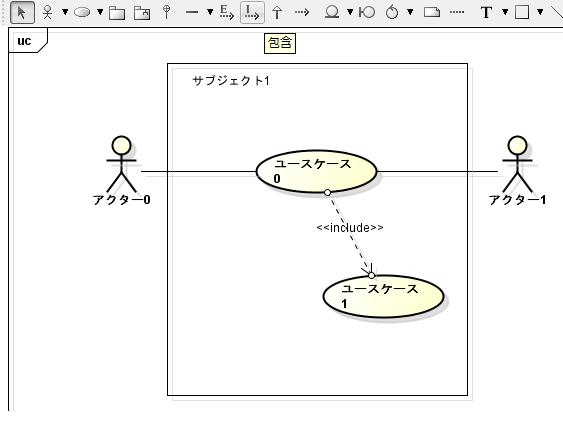
包含ボタンを選択後ユースケースを選択すると包含を表現できます。
ユースケース0はユースケース1が含まれているという意味とからしいです
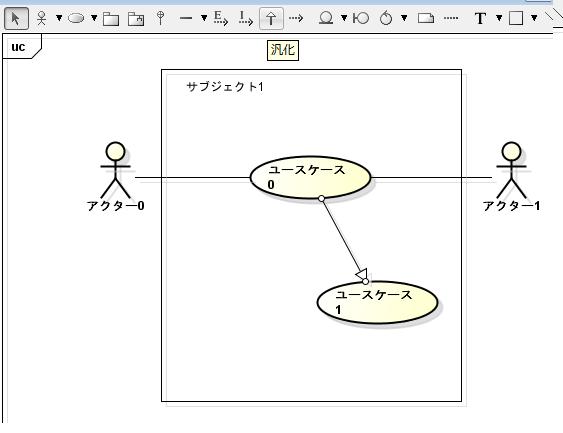
汎化ボタンを選択後、ユースケースもしくはアクターを選択すると汎化を表現できます。
以下の場合、ユースケース0はユースケース1をより具体化したものになるとかならないとからしいです。
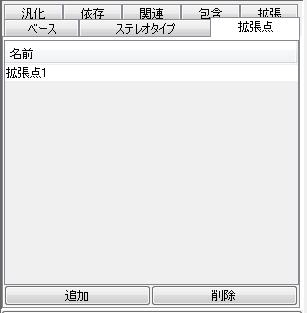
さらに拡張するタイミングを定義した拡張点を追加できるとからしいです。
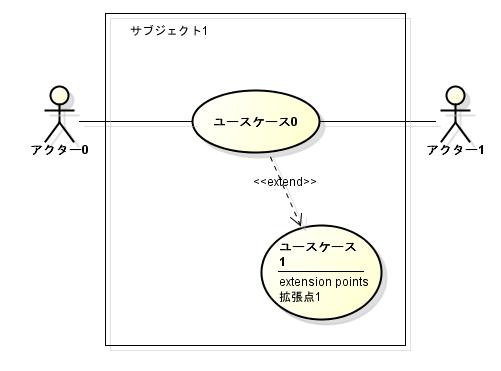
拡張点はユースケースを選択後、左下のウィジェットから拡張点タブを選択して追加できるみたいです。
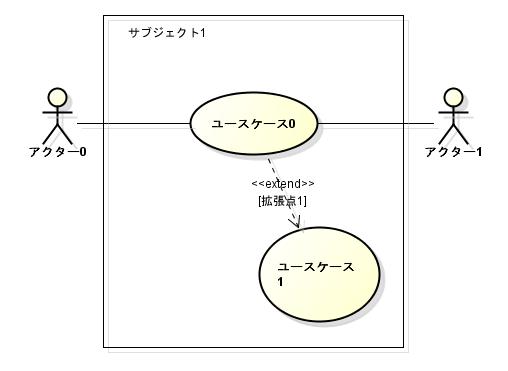
このサイトを読んでると、拡張点は以下のように表現できるらしいですが上の図と意味は同じと考えていいのでしょうかね?
UMLの話は今日でとりあえず終わりにします。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

皆さんもCORBAを実装する際は参考にしてみてはいかがでしょうか?
どうにもCORBAが僕みたいな素人には理解しづらい原因として、仕組み以前に用語の意味がよくわからないということがあると思います。
例えば以下の用語です。
- GIOP
- IIOP
- IDL
- スタブ
- スケルトン
- orb
- ネーミングサービス
- POA
- CDR
まあでも自分でRTミドルウェアを実装するにしても既存のCORBA実装を使えば十分な事も多いと思うので、このブログを見てる人でCORBAから実装しようとか考えている人はいないかもしれないですけど。
それはさておき、今回はユースケース図の話をします。
astah* communityを起動して図→ユースケース図を選択してください。
とりあえず適当にアクターとユースケースを追加してみます。
アクターはシステムを利用するユーザー等の外部に存在するもの、ユースケースはアクターがシステムを使ってできる事を表現しているとかそうではないとからしいです。
通常は以下のように作成したシステムはサブジェクトという四角形で囲むらしいのですが、作成するボタンが見つからなかったため長方形とテキストで形だけ作っています。
拡張ボタンを選択後、ユースケースを選択すると拡張を表現できます。
以下の場合ユースケース0がユースケース1に機能を追加するという意味になるとからしいです。
包含ボタンを選択後ユースケースを選択すると包含を表現できます。
ユースケース0はユースケース1が含まれているという意味とからしいです
汎化ボタンを選択後、ユースケースもしくはアクターを選択すると汎化を表現できます。
以下の場合、ユースケース0はユースケース1をより具体化したものになるとかならないとからしいです。
さらに拡張するタイミングを定義した拡張点を追加できるとからしいです。
拡張点はユースケースを選択後、左下のウィジェットから拡張点タブを選択して追加できるみたいです。
このサイトを読んでると、拡張点は以下のように表現できるらしいですが上の図と意味は同じと考えていいのでしょうかね?
UMLの話は今日でとりあえず終わりにします。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする