ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
皆さん設定していないのですが、プロジェクト作成の際に「Project resources」→「Screenshots」で画像を設定すればプロジェクトページの目立つ位置に表示されます。
できるだけ印象的な画像を設定しておけば人が来るかもしれませんし、来ないかもしれません。
とりあえず、僕のページは目立つ画像にしておいたので、皆さんも適当な画像を設定してください。
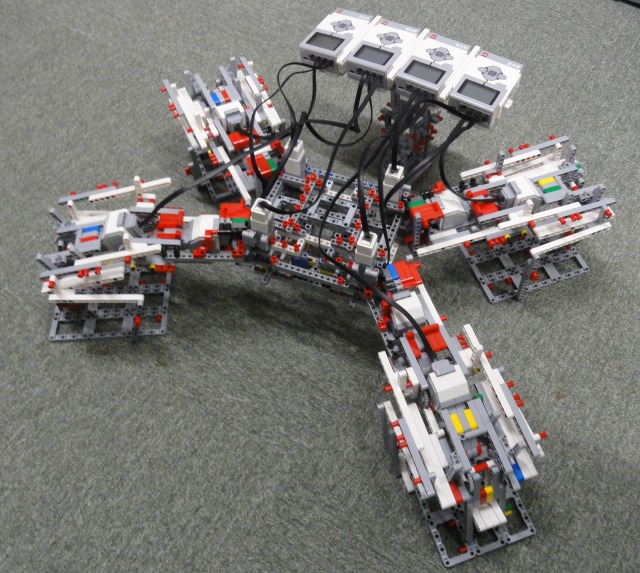
ちなみにこれはレゴマインドストームEV3を4台使用して作成した四足歩行ロボットです。
EV3を4台持っている人は試してみてください。
更新があったようなので、この作品の感想を書きます。
だから何でマニュアルをpdf化するのか。今年は特に酷いような気がします。
どうして印刷して読んでもらえると思うのか。逆の立場に立ってよく考えてほしいです。
ただ、それを差し引いてもマニュアルはよくできていると思います。
動作させるのに必要最低限の情報は揃っていると思うので、他の人は参考にしてください。
ソースコードを読ませてもらったのですが、全体的によくできているとは思います。
ただ、グローバル変数を使うのはバグの原因になるのでやめてほしいです。
この作品の場合、問題はそれよりも異様に多いマジックナンバーの方かもしれません。
全体読んで気になったのは以下の点ぐらいでしょうかね。
最大の問題はどこに独自性、新規性があるのか。
教育目的の題材はもう飽きているころなので、作品自体の出来の割にはかなり厳しい評価になるかもしれません。
後でコメントは投稿します。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

できるだけ印象的な画像を設定しておけば人が来るかもしれませんし、来ないかもしれません。
とりあえず、僕のページは目立つ画像にしておいたので、皆さんも適当な画像を設定してください。
ちなみにこれはレゴマインドストームEV3を4台使用して作成した四足歩行ロボットです。
EV3を4台持っている人は試してみてください。
更新があったようなので、この作品の感想を書きます。
だから何でマニュアルをpdf化するのか。今年は特に酷いような気がします。
どうして印刷して読んでもらえると思うのか。逆の立場に立ってよく考えてほしいです。
ただ、それを差し引いてもマニュアルはよくできていると思います。
動作させるのに必要最低限の情報は揃っていると思うので、他の人は参考にしてください。
ソースコードを読ませてもらったのですが、全体的によくできているとは思います。
ただ、グローバル変数を使うのはバグの原因になるのでやめてほしいです。
この作品の場合、問題はそれよりも異様に多いマジックナンバーの方かもしれません。
全体読んで気になったのは以下の点ぐらいでしょうかね。
- ChoreonoidCRANEControllerRTCのActCommand関数で、現在位置と過去の位置を0.001という数値で割っているのですが、どうして刻み幅が0.001になるのかが不明
- kobukiに載せた意味が分からない
- pgain、dgainをどうやって決めたかが不明
- moveLinearCartesianAbs関数は直交空間の直線補間が本来の動作のはずだが、ただ目標角度をデジタルサーボに入力しているだけなので本来の動作になっていない可能性あり
- カテゴリ名をCategoryのままにしているのは雑すぎる
- ActCommand関数でangleというインポートからデータを読み込んでいるが、isNew関数による判定がないためデータがないときどうなるか不明
- 見たところ、ChoreonoidCRANEControllerRTCとRT_CRANE_RTCのManipulatorCommonInterface_MiddleLevelSVC_impl.cppの違いはsimcodeを変更するぐらいしかない。グローバル変数を乱用する事自体が問題だが、同じファイルを使うように工夫をすべき。
最大の問題はどこに独自性、新規性があるのか。
教育目的の題材はもう飽きているころなので、作品自体の出来の割にはかなり厳しい評価になるかもしれません。
後でコメントは投稿します。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
この記事にコメントする