ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
何でもいいので僕の作品にコメントください。
四足歩行ロボット制御用RTコンポーネント群
小型移動ロボットによるRTミドルウェア学習教材
人の作品にコメントを投稿しているのですが、返信がないものもあります。
何だか終わらない問答を繰り返しているコメント欄もありますが、無いものは無いのだからそう言えばいいのだと思います。
考えていなかったのであればそれでもいいですし、「既存のものとは違うものを作りたかった」という言い訳でも構わないと思います。
ただ理由が無いところに無理やり理由をつけようとするからおかしくなるのであって、無いものは無いと言った方がいいと思います。このままでは話が別方向に逸れる一方です。
まだ感想を書いていない作品があったので感想を書きます。
この作品の感想を書きます。
突っ込みどころはコメントを投稿したので省略します。
それにしても、ID入力に何故ああいうインターフェースを使う事になったのかは最大の謎です。
最大の問題は、使い方がよく分からない、というか実際に使った例が一切ないのはまずいです。
こうなるとユーザーが利用するのは非常に難しくなってきますし、そもそも本当に動作するのかも怪しくなってきます。
まあ著作権的に非常に怪しいコードがあるので、それに問題があるかないかの調査が最優先だとは思いますけど。
次はこの作品の感想を書きます。
マニュアルは・・・ないのか。
pdfのマニュアルでも無いよりかはいくらかましだとは思うのですが、一切無いとなると何を作ったのかの把握すら難しくなってきます。
ソースコードを読んではみたので、一応気になった点はメモします。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

四足歩行ロボット制御用RTコンポーネント群
小型移動ロボットによるRTミドルウェア学習教材
人の作品にコメントを投稿しているのですが、返信がないものもあります。
何だか終わらない問答を繰り返しているコメント欄もありますが、無いものは無いのだからそう言えばいいのだと思います。
考えていなかったのであればそれでもいいですし、「既存のものとは違うものを作りたかった」という言い訳でも構わないと思います。
ただ理由が無いところに無理やり理由をつけようとするからおかしくなるのであって、無いものは無いと言った方がいいと思います。このままでは話が別方向に逸れる一方です。
まだ感想を書いていない作品があったので感想を書きます。
この作品の感想を書きます。
突っ込みどころはコメントを投稿したので省略します。
それにしても、ID入力に何故ああいうインターフェースを使う事になったのかは最大の謎です。
最大の問題は、使い方がよく分からない、というか実際に使った例が一切ないのはまずいです。
こうなるとユーザーが利用するのは非常に難しくなってきますし、そもそも本当に動作するのかも怪しくなってきます。
まあ著作権的に非常に怪しいコードがあるので、それに問題があるかないかの調査が最優先だとは思いますけど。
次はこの作品の感想を書きます。
マニュアルは・・・ないのか。
pdfのマニュアルでも無いよりかはいくらかましだとは思うのですが、一切無いとなると何を作ったのかの把握すら難しくなってきます。
ソースコードを読んではみたので、一応気になった点はメモします。
- Wheel_radiusというコンフィギュレーションは未使用。おそらくロボット中心位置の速度から車輪の速度への変換は正しく行われていない。
- RTCのモジュール仕様に誤字らしき記述が多いので、見直した方がいい
- 3Dモデルファイルはkobuki-tatlebot.wrl+patsフォルダで一つだと思うので、分離しておかないと3Dモデルだけ使いまわしたい場合に分かりづらい
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
RTMコンテストの作品投稿をしたらメーリングリストでお知らせのメールを出すことになっているのですが、何故か数人しか出していません。
ひょっとしたらメーリングリストに登録していないという可能性も無きにしも非ずですが、別にこれで評価は変わらないだろうし気にしない事にします。
他の人のおしらせメールを見てい思ったのですが、もう少し作品自体のアピールをしてほしいです。
メーリングリストでお知らせメールを受け取ったのは審査員だけではなく、むしろ審査とは一切関係ないただのユーザーの人がほとんどなので、「どういう人が作った」とか「誰それに評価されている」とかあまり興味が無いかもしれないです。
コメント欄を見ていて気になったのですが、サポートする側とサポートされる側が逆転しているものがあるように思いました。
コメントを投稿した人が「こういう風にしたらどうですが?」から「教えてくれてありがとう」はもちろん問題ありません。むしろ積極的にこういうやりとりはしてください。
ただコメントを投稿してくれた人に「どうしたらいいですか?」と返信するのは何か違います。
むしろやむを得ない場合を除いてはやってはいけない事の一つだと思います。
コメントを投稿する人はただのユーザーであって、教育者ではありません。
それよりも、僕の作品に何かコメントをください。
悪口でも構いません。
四足歩行ロボット制御用RTコンポーネント群
小型移動ロボットによるRTミドルウェア学習教材
もう少しマニュアルは充実させる予定です。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
ひょっとしたらメーリングリストに登録していないという可能性も無きにしも非ずですが、別にこれで評価は変わらないだろうし気にしない事にします。
他の人のおしらせメールを見てい思ったのですが、もう少し作品自体のアピールをしてほしいです。
メーリングリストでお知らせメールを受け取ったのは審査員だけではなく、むしろ審査とは一切関係ないただのユーザーの人がほとんどなので、「どういう人が作った」とか「誰それに評価されている」とかあまり興味が無いかもしれないです。
コメント欄を見ていて気になったのですが、サポートする側とサポートされる側が逆転しているものがあるように思いました。
コメントを投稿した人が「こういう風にしたらどうですが?」から「教えてくれてありがとう」はもちろん問題ありません。むしろ積極的にこういうやりとりはしてください。
ただコメントを投稿してくれた人に「どうしたらいいですか?」と返信するのは何か違います。
むしろやむを得ない場合を除いてはやってはいけない事の一つだと思います。
コメントを投稿する人はただのユーザーであって、教育者ではありません。
それよりも、僕の作品に何かコメントをください。
悪口でも構いません。
四足歩行ロボット制御用RTコンポーネント群
小型移動ロボットによるRTミドルウェア学習教材
もう少しマニュアルは充実させる予定です。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
とりあえず、EV3を4台使った四足歩行ロボットの動画をアップロードしたので、見てみてください。
是非組み立ててみてくださいとか言うと、「EV3を4台も普通は用意できないだろ」とか「どうやって組み立てるんだよ」とか突っ込みが入りそうですが、僕でももう一度組み立てるのは無理なので細かい事は気にしないようにしてください。一種の芸術作品だと思ってくれてもいいです。
TETRIXで乗り物を作ってみたので、持っている人は乗って遊んでください。
他の作品のコメント欄に好き勝手なことを書いていたら怒られました。
ちょっと言い方が悪かったような気はします。コメントは消さないけど。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
是非組み立ててみてくださいとか言うと、「EV3を4台も普通は用意できないだろ」とか「どうやって組み立てるんだよ」とか突っ込みが入りそうですが、僕でももう一度組み立てるのは無理なので細かい事は気にしないようにしてください。一種の芸術作品だと思ってくれてもいいです。
TETRIXで乗り物を作ってみたので、持っている人は乗って遊んでください。
他の作品のコメント欄に好き勝手なことを書いていたら怒られました。
ちょっと言い方が悪かったような気はします。コメントは消さないけど。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
今日はこの作品の感想を書きます。
まずプロジェクトページを見て気になったのは「説明書とコンポーネント(185MB)」という記述です。流石に重すぎるので調べてみたら、予想通りbuildフォルダを消していません。
そしてマニュアルはpdf、それからwordのマニュアルも入っているようです。
もうマニュアルはpdfでいいよ・・・
他の「教育用」や「学習用」と名の付く作品と比べたら、目的の分かりやすいドキュメントだとは思います。
ソースコードを読んでみた感じだと、KeyInのonExecute関数でSleepで待機している処理の意味が不明な点等が気になりました。
後はコメントを投稿しておいたので対応待ちです。
全体的に見て、なんだか中途半端だなあとは思いました。
pdfのマニュアルが何故駄目なのかを説明します。
まずどのファイルを開けばいいのかよく分かりません。
大抵の場合、この作品のように「はじめに,お読みください~」やReadMeに書いてはあるのですが、同じ名前のファイルを探して開けと言うのが非常に面倒くさいです。
そして何か参考にしてほしい情報がpdfファイルにある場合、リンクを貼るのがWEBページほど簡単ではありません。
特にこんな感じでマニュアルをZIPファイルの中に入れてしまったら不可能です。
そして個人的な感覚ですが、読みづらい感じがします。
ページに分けられている関係上、自由度が少ないのが原因かもしれません。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
まずプロジェクトページを見て気になったのは「説明書とコンポーネント(185MB)」という記述です。流石に重すぎるので調べてみたら、予想通りbuildフォルダを消していません。
そしてマニュアルはpdf、それからwordのマニュアルも入っているようです。
もうマニュアルはpdfでいいよ・・・
他の「教育用」や「学習用」と名の付く作品と比べたら、目的の分かりやすいドキュメントだとは思います。
ソースコードを読んでみた感じだと、KeyInのonExecute関数でSleepで待機している処理の意味が不明な点等が気になりました。
後はコメントを投稿しておいたので対応待ちです。
全体的に見て、なんだか中途半端だなあとは思いました。
pdfのマニュアルが何故駄目なのかを説明します。
まずどのファイルを開けばいいのかよく分かりません。
大抵の場合、この作品のように「はじめに,お読みください~」やReadMeに書いてはあるのですが、同じ名前のファイルを探して開けと言うのが非常に面倒くさいです。
そして何か参考にしてほしい情報がpdfファイルにある場合、リンクを貼るのがWEBページほど簡単ではありません。
特にこんな感じでマニュアルをZIPファイルの中に入れてしまったら不可能です。
そして個人的な感覚ですが、読みづらい感じがします。
ページに分けられている関係上、自由度が少ないのが原因かもしれません。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
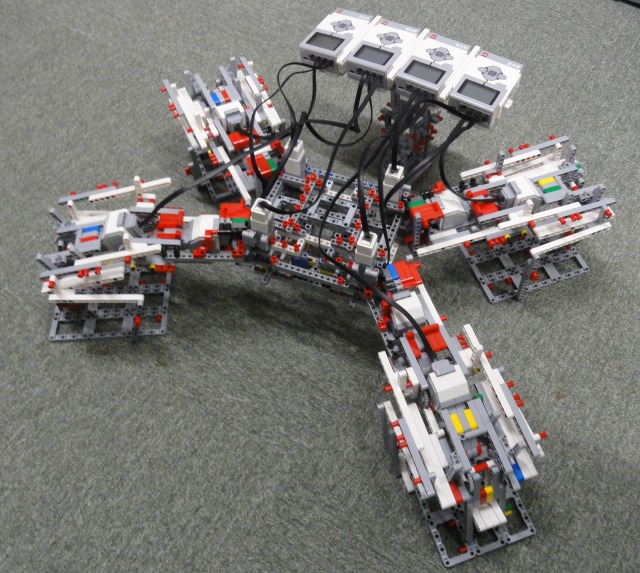
皆さん設定していないのですが、プロジェクト作成の際に「Project resources」→「Screenshots」で画像を設定すればプロジェクトページの目立つ位置に表示されます。
できるだけ印象的な画像を設定しておけば人が来るかもしれませんし、来ないかもしれません。
とりあえず、僕のページは目立つ画像にしておいたので、皆さんも適当な画像を設定してください。
ちなみにこれはレゴマインドストームEV3を4台使用して作成した四足歩行ロボットです。
EV3を4台持っている人は試してみてください。
更新があったようなので、この作品の感想を書きます。
だから何でマニュアルをpdf化するのか。今年は特に酷いような気がします。
どうして印刷して読んでもらえると思うのか。逆の立場に立ってよく考えてほしいです。
ただ、それを差し引いてもマニュアルはよくできていると思います。
動作させるのに必要最低限の情報は揃っていると思うので、他の人は参考にしてください。
ソースコードを読ませてもらったのですが、全体的によくできているとは思います。
ただ、グローバル変数を使うのはバグの原因になるのでやめてほしいです。
この作品の場合、問題はそれよりも異様に多いマジックナンバーの方かもしれません。
全体読んで気になったのは以下の点ぐらいでしょうかね。
最大の問題はどこに独自性、新規性があるのか。
教育目的の題材はもう飽きているころなので、作品自体の出来の割にはかなり厳しい評価になるかもしれません。
後でコメントは投稿します。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
できるだけ印象的な画像を設定しておけば人が来るかもしれませんし、来ないかもしれません。
とりあえず、僕のページは目立つ画像にしておいたので、皆さんも適当な画像を設定してください。
ちなみにこれはレゴマインドストームEV3を4台使用して作成した四足歩行ロボットです。
EV3を4台持っている人は試してみてください。
更新があったようなので、この作品の感想を書きます。
だから何でマニュアルをpdf化するのか。今年は特に酷いような気がします。
どうして印刷して読んでもらえると思うのか。逆の立場に立ってよく考えてほしいです。
ただ、それを差し引いてもマニュアルはよくできていると思います。
動作させるのに必要最低限の情報は揃っていると思うので、他の人は参考にしてください。
ソースコードを読ませてもらったのですが、全体的によくできているとは思います。
ただ、グローバル変数を使うのはバグの原因になるのでやめてほしいです。
この作品の場合、問題はそれよりも異様に多いマジックナンバーの方かもしれません。
全体読んで気になったのは以下の点ぐらいでしょうかね。
- ChoreonoidCRANEControllerRTCのActCommand関数で、現在位置と過去の位置を0.001という数値で割っているのですが、どうして刻み幅が0.001になるのかが不明
- kobukiに載せた意味が分からない
- pgain、dgainをどうやって決めたかが不明
- moveLinearCartesianAbs関数は直交空間の直線補間が本来の動作のはずだが、ただ目標角度をデジタルサーボに入力しているだけなので本来の動作になっていない可能性あり
- カテゴリ名をCategoryのままにしているのは雑すぎる
- ActCommand関数でangleというインポートからデータを読み込んでいるが、isNew関数による判定がないためデータがないときどうなるか不明
- 見たところ、ChoreonoidCRANEControllerRTCとRT_CRANE_RTCのManipulatorCommonInterface_MiddleLevelSVC_impl.cppの違いはsimcodeを変更するぐらいしかない。グローバル変数を乱用する事自体が問題だが、同じファイルを使うように工夫をすべき。
最大の問題はどこに独自性、新規性があるのか。
教育目的の題材はもう飽きているころなので、作品自体の出来の割にはかなり厳しい評価になるかもしれません。
後でコメントは投稿します。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・