ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
前回の続きですが,今回は蛇型ロボットをCPG(Central Pattern Generator)で制御します.
前回の蛇行運動とあまり差がないように見えますが,アルゴリズムは全く違います.
解説したいところですが,僕は蛇型ロボットの研究はやってますがCPGには全く関係ないので,適当克ついいかげんに解説します.
CPGは生物規範型の制御方法です.
身体知システム論―ヒューマンロボティクスによる運動の学習と制御(伊藤宏,共立出版,2005)によると,
「動物は,運動器官に対して1対1の神経回路をもちつつ,同時に,それらが密接に結合されている」
らしく,ロボットの制御に用いる場合,筋肉がそれぞれニューロンをもっており,それらが相互抑制し合う回路となります.
この論文のFig.4がわかりやすいかと思います.
実際のロボットは,筋肉ではなく,回転モータで駆動される場合が多いので,伸筋と屈筋のニューロンの出力の差を回転角度としてやります.
実際の式としては,以下のようになります.
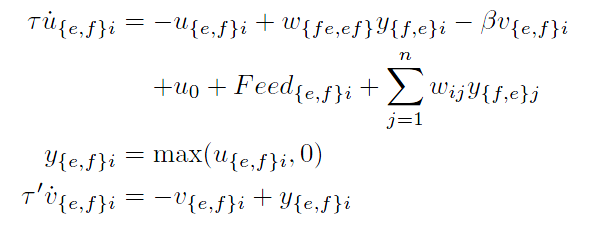
ここで,y{e,f}iがニューロンの状態です.
v{e,f}iは疲労で,w{fe,ef}は伸筋,屈筋間の結合係数,wijはそれ以外の結合係数,u0は持続性入力,Feedはセンサからのフィードバック信号です.
蛇の場合は,伸筋と屈筋の間で相互抑制するのは他と同じですが,1つ後ろの関節のニューロンと結合しており,ここは相互抑制ではなく,一方的に後ろに信号を送るだけです.
さらに,今回は一番前の関節から4番目の関節へも結合しています.
こうしないと,なぜかうまくいきません.
蛇型ロボットのCPGによる制御としては発展型としてCubic CPG,循環抑制型CPGネットワーク等があります.
参考文献
[1]伊藤宏,身体知システム論―ヒューマンロボティクスによる運動の学習と制御,共立出版,2005
[2] 稲田博信,石井和男,CPG を用いた2 足歩行ロボットの3 次元歩行シミュレーション,http://www.brain.kyutech.ac.jp/~ishii/Paper/2002/2002_RSJ_Inada.pdf#search=%27CPG%20%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%202%20%E8%B6%B3%E6%AD%A9%E8%A1%8C%E3%83%AD%E3%83%9C%E3%83%83%E3%83%88%E3%81%AE%203%20%E6%AC%A1%E5%85%83%E6%AD%A9%E8%A1%8C%E3%82%B7%E3%83%9F%E3%83%A5%E3%83%AC%E3%83%BC%E3%82%B7%E3%83%A7%E3%83%B3%27
[3]Xiaodong Wu,Shugen Ma,CPG-based control of serpentine locomotion of a snake-like robot,Mechatronics 20 (2010) 326–334
[4]Chaoquan Tang, Shugen Ma, A Cubic CPG Model for Snake-like Robot to Adapt to Environment,International Conference on Information and Automation June 20 - 23, Harbin, China
[5]佐藤 智紀 , 馬 書根 , 井上 康介, 蛇型ロボットの自律分散制御システムの開発, ロボティクス・メカトロニクス講演会講演概要集 2005, 96, 2005-06-09

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
前回の蛇行運動とあまり差がないように見えますが,アルゴリズムは全く違います.
解説したいところですが,僕は蛇型ロボットの研究はやってますがCPGには全く関係ないので,適当克ついいかげんに解説します.
CPGは生物規範型の制御方法です.
身体知システム論―ヒューマンロボティクスによる運動の学習と制御(伊藤宏,共立出版,2005)によると,
「動物は,運動器官に対して1対1の神経回路をもちつつ,同時に,それらが密接に結合されている」
らしく,ロボットの制御に用いる場合,筋肉がそれぞれニューロンをもっており,それらが相互抑制し合う回路となります.
この論文のFig.4がわかりやすいかと思います.
実際のロボットは,筋肉ではなく,回転モータで駆動される場合が多いので,伸筋と屈筋のニューロンの出力の差を回転角度としてやります.
実際の式としては,以下のようになります.
ここで,y{e,f}iがニューロンの状態です.
v{e,f}iは疲労で,w{fe,ef}は伸筋,屈筋間の結合係数,wijはそれ以外の結合係数,u0は持続性入力,Feedはセンサからのフィードバック信号です.
蛇の場合は,伸筋と屈筋の間で相互抑制するのは他と同じですが,1つ後ろの関節のニューロンと結合しており,ここは相互抑制ではなく,一方的に後ろに信号を送るだけです.
さらに,今回は一番前の関節から4番目の関節へも結合しています.
こうしないと,なぜかうまくいきません.
蛇型ロボットのCPGによる制御としては発展型としてCubic CPG,循環抑制型CPGネットワーク等があります.
参考文献
[1]伊藤宏,身体知システム論―ヒューマンロボティクスによる運動の学習と制御,共立出版,2005
[2] 稲田博信,石井和男,CPG を用いた2 足歩行ロボットの3 次元歩行シミュレーション,http://www.brain.kyutech.ac.jp/~ishii/Paper/2002/2002_RSJ_Inada.pdf#search=%27CPG%20%E3%82%92%E7%94%A8%E3%81%84%E3%81%9F%202%20%E8%B6%B3%E6%AD%A9%E8%A1%8C%E3%83%AD%E3%83%9C%E3%83%83%E3%83%88%E3%81%AE%203%20%E6%AC%A1%E5%85%83%E6%AD%A9%E8%A1%8C%E3%82%B7%E3%83%9F%E3%83%A5%E3%83%AC%E3%83%BC%E3%82%B7%E3%83%A7%E3%83%B3%27
[3]Xiaodong Wu,Shugen Ma,CPG-based control of serpentine locomotion of a snake-like robot,Mechatronics 20 (2010) 326–334
[4]Chaoquan Tang, Shugen Ma, A Cubic CPG Model for Snake-like Robot to Adapt to Environment,International Conference on Information and Automation June 20 - 23, Harbin, China
[5]佐藤 智紀 , 馬 書根 , 井上 康介, 蛇型ロボットの自律分散制御システムの開発, ロボティクス・メカトロニクス講演会講演概要集 2005, 96, 2005-06-09
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
久々にPyODEでシミュレーションします.
今回作成したシミュレーションのプログラムのソースはここから入手できます.
今回は蛇型ロボットです.
蛇型ロボットもいろいろな移動形態が研究されていて,いくつか例を挙げると,
蛇行移動です.
多分これの研究が一番多いような気がする.
サイドワインディングです.
砂漠のヘビがよく使う移動方法です.
蛇行移動では,推進方向は滑りやすく,横滑りはしにくい必要があります.
蛇型ロボットの多くは受動車輪でそれを実現しています.
しかしながら,砂漠では推進方向への摩擦が大きくなるため,蛇行移動は出来ません.
対して,サイドワインディングなら受動車輪無しでも移動できます.
サイナソイダルです.
これはちょっとマイナーかも.
サイナスリフティングです.
これではちょっとわかりずらいので,
激しく動かすとこんな感じです.
蛇行運動にピッチ軸の動きを加えています.
蛇行曲線の曲率の大きいところ程,地面からの抗力を大きくして,摩擦による拘束力を大きくしています.
他にも Rolling track,Lateral rolling,Helical motion,Rectilinear movement,Concertina movement等があります.
<追記>
最近気づいたんだが,蛇型ロボットってヒューマノイドより難しい・・・・・多分.
ヒューマノイドをそんなに深くやったことないのであれだが.
参考文献
[1] 広瀬茂男:生物機械工学.工業調査会,1987.
[2] Shugen Ma,Guangping Lan, Yuki Tanabe and Ryo Sasaki and Kousuke Inoue,A Serpentine Robot Based on 3 DOF Coupled-driven Joint,International Conference on Robotics and Biomimetics August 22 - 26, 2004, Shenyang, China
[3]Shumei Yu, Shugen Ma, Bin Li, Yuechao Wang,Analysis of Helical Gait of a Snake-like Robot,International Conference on Advanced Intelligent Mechatronics July 2 - 5, 2008, Xi'an, China
[4]大豆生田 吉広 , 馬 書根 , 井上 康介,3次元蛇型ロボットの動力学解析,日本機械学會論文集. C編 70(692), 1077-1084, 2004-04-25
[5]Mark Yim, Kimon Roufas, David Duff, Ying Zhang, Craig Eldershaw, Sam Homans,Modular Reconfigurable Robots in Space Applications,http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.84.3674&rep=rep1&type=pdf
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
今回作成したシミュレーションのプログラムのソースはここから入手できます.
今回は蛇型ロボットです.
蛇型ロボットもいろいろな移動形態が研究されていて,いくつか例を挙げると,
蛇行移動です.
多分これの研究が一番多いような気がする.
サイドワインディングです.
砂漠のヘビがよく使う移動方法です.
蛇行移動では,推進方向は滑りやすく,横滑りはしにくい必要があります.
蛇型ロボットの多くは受動車輪でそれを実現しています.
しかしながら,砂漠では推進方向への摩擦が大きくなるため,蛇行移動は出来ません.
対して,サイドワインディングなら受動車輪無しでも移動できます.
サイナソイダルです.
これはちょっとマイナーかも.
サイナスリフティングです.
これではちょっとわかりずらいので,
激しく動かすとこんな感じです.
蛇行運動にピッチ軸の動きを加えています.
蛇行曲線の曲率の大きいところ程,地面からの抗力を大きくして,摩擦による拘束力を大きくしています.
他にも Rolling track,Lateral rolling,Helical motion,Rectilinear movement,Concertina movement等があります.
<追記>
最近気づいたんだが,蛇型ロボットってヒューマノイドより難しい・・・・・多分.
ヒューマノイドをそんなに深くやったことないのであれだが.
参考文献
[1] 広瀬茂男:生物機械工学.工業調査会,1987.
[2] Shugen Ma,Guangping Lan, Yuki Tanabe and Ryo Sasaki and Kousuke Inoue,A Serpentine Robot Based on 3 DOF Coupled-driven Joint,International Conference on Robotics and Biomimetics August 22 - 26, 2004, Shenyang, China
[3]Shumei Yu, Shugen Ma, Bin Li, Yuechao Wang,Analysis of Helical Gait of a Snake-like Robot,International Conference on Advanced Intelligent Mechatronics July 2 - 5, 2008, Xi'an, China
[4]大豆生田 吉広 , 馬 書根 , 井上 康介,3次元蛇型ロボットの動力学解析,日本機械学會論文集. C編 70(692), 1077-1084, 2004-04-25
[5]Mark Yim, Kimon Roufas, David Duff, Ying Zhang, Craig Eldershaw, Sam Homans,Modular Reconfigurable Robots in Space Applications,http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.84.3674&rep=rep1&type=pdf
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
いつのまにか,にほんブログ村のPythonのカテゴリーの参加人数が7人に増えてますね.
数ヶ月前までは僕1人だったのに.
ようやく,みんなPythonの素晴らしさに気付き始めたってことでしょう.誇張しすぎ
それから,お知らせです.
ちょっと前の記事で,ヒューマンインタフェースシンポジウムの感想を書くと言いましたが・・・
忙しいのでやめときます.
講演会に参加するのも,タダじゃないですしね.
ここまでの話とは全く,一切関係ない話ですが・・・
昨日のHISAOのヒットで,ものすごいテンションが上がりました.
どうせ得点に繋がらんだろうと思ってたら,
案の定,小谷野のファインプレーでゲッツーとなりました.
予定調和すぎる・・・
ランキングに参加してます。押していただけると今まで経験がないくらい嬉しいです。

にほんブログ村の
Pythonのカテゴリ
現在参加人数7人・・・

数ヶ月前までは僕1人だったのに.
ようやく,みんなPythonの素晴らしさに気付き始めたってことでしょう.
それから,お知らせです.
ちょっと前の記事で,ヒューマンインタフェースシンポジウムの感想を書くと言いましたが・・・
忙しいのでやめときます.
講演会に参加するのも,タダじゃないですしね.
ここまでの話とは全く,一切関係ない話ですが・・・
昨日のHISAOのヒットで,ものすごいテンションが上がりました.
どうせ得点に繋がらんだろうと思ってたら,
案の定,小谷野のファインプレーでゲッツーとなりました.
予定調和すぎる・・・
ランキングに参加してます。押していただけると今まで経験がないくらい嬉しいです。
にほんブログ村の
Pythonのカテゴリ
現在参加人数7人・・・
というわけで,今年も参加します.懲りもせず
とは言っても,ロボットモデリングツールをそのまんま出します.ありなのか?
既に800ぐらいダウンロードがあったみたいですけど,時間がないので・・・
さすがに,そのまんまはまずそうなので,Linux版を作ったり,バグを取ったりしてから出しますが.
・・・受賞は無理そうだなぁ.去年はトラウマ
あ,そうそう.
申し込み締め切りが9月9日(木)24:00に延長されたみたいなので,12月23~25日が暇な人は考えてみてはどうでしょうか?
ちなみに僕の研究室では,その時期に卒業旅行?(卒業してないが)で学部4年と修士2年の人はスキーに行くらしいのですが,スキーに行く金を使って東北大学まで行ってきます.
<追記>
さっき気がついたんですけど,RTミドルウェアコンテストのページに僕のHPがリンクされてますね.
・・・なぜか,ほかのサイトの管理人さんは本名なのに僕だけHNになってるのがやたら気になりますが.
なんか,所属が間違ってる人もいますしね.
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
とは言っても,ロボットモデリングツールをそのまんま出します.
既に800ぐらいダウンロードがあったみたいですけど,時間がないので・・・
さすがに,そのまんまはまずそうなので,Linux版を作ったり,バグを取ったりしてから出しますが.
・・・受賞は無理そうだなぁ.
あ,そうそう.
申し込み締め切りが9月9日(木)24:00に延長されたみたいなので,12月23~25日が暇な人は考えてみてはどうでしょうか?
ちなみに僕の研究室では,その時期に卒業旅行?(卒業してないが)で学部4年と修士2年の人はスキーに行くらしいのですが,スキーに行く金を使って東北大学まで行ってきます.
<追記>
さっき気がついたんですけど,RTミドルウェアコンテストのページに僕のHPがリンクされてますね.
・・・なぜか,ほかのサイトの管理人さんは本名なのに僕だけHNになってるのがやたら気になりますが.
なんか,所属が間違ってる人もいますしね.
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
前々回予告したとおり,第15回知能メカトロニクスワークショップの感想を書きます.
こういう講演会とかに参加すると毎回思うのですが・・・
学生が誰も質問しない
僕は発表もしないのにわざわざ金を払って来てるわけですから,質問しますけど.
自分の発表で手一杯なんでしょうかね?
あと,この講演会に限ったことですが・・・
参加者がほとんど四国周辺の大学なので完全にアウェーというか.
知り合いを作ろうと思って,わざわざ名刺を作って行ったのですが,誰にも渡せませんでした.
さて,気になった発表の感想を書きます.
複素ニューラルネットワークを用いた群移動ロボットシステムの耐故障特性(鈴木浩司,安野卓,漆原史朗,安野恵実子,桑原明伸)
この発表は,面白かったと思うんですけどね.
実機での動作もできてるみたいですし.
Javaをベースとした力覚Webシステムの開発(出海寛仁,井門俊)
とうとうそんなことが出来る時代か・・・というのが正直な感想ですかね.
本当に遅延がないのかが若干気になりますが.
VRシミュレータSAXES2における関節モデルに関する研究(加藤大騎,宮内皓平,井門俊)
このソフト公開すれば良いと思うんですけどね.
一度使ってみたいです.
他にも気になった発表はあったのですが,悪口になりそうなのでやめときます.
<追記>
1つ,どうしても気になったことがあったのですが・・・・
英語で発表している人が居たのですが,
いくら質問が出ないからって,進行役の人が「日本語大丈夫ですか?」はないと思うんですよね.
大学の先生っぽい人たちからも質問が出てなかったってことは,それが原因じゃないんでしょうし.
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
こういう講演会とかに参加すると毎回思うのですが・・・
学生が誰も質問しない
僕は発表もしないのにわざわざ金を払って来てるわけですから,質問しますけど.
自分の発表で手一杯なんでしょうかね?
あと,この講演会に限ったことですが・・・
参加者がほとんど四国周辺の大学なので完全にアウェーというか.
知り合いを作ろうと思って,わざわざ名刺を作って行ったのですが,誰にも渡せませんでした.
さて,気になった発表の感想を書きます.
複素ニューラルネットワークを用いた群移動ロボットシステムの耐故障特性(鈴木浩司,安野卓,漆原史朗,安野恵実子,桑原明伸)
この発表は,面白かったと思うんですけどね.
実機での動作もできてるみたいですし.
Javaをベースとした力覚Webシステムの開発(出海寛仁,井門俊)
とうとうそんなことが出来る時代か・・・というのが正直な感想ですかね.
本当に遅延がないのかが若干気になりますが.
VRシミュレータSAXES2における関節モデルに関する研究(加藤大騎,宮内皓平,井門俊)
このソフト公開すれば良いと思うんですけどね.
一度使ってみたいです.
他にも気になった発表はあったのですが,悪口になりそうなのでやめときます.
<追記>
1つ,どうしても気になったことがあったのですが・・・・
英語で発表している人が居たのですが,
いくら質問が出ないからって,進行役の人が「日本語大丈夫ですか?」はないと思うんですよね.
大学の先生っぽい人たちからも質問が出てなかったってことは,それが原因じゃないんでしょうし.
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・