ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
突然ですがクイズです。
前回に記事の中でふざけている所が一箇所あります。
さてどこでしょうか?
ちょっと脱がせ方が安易だったかもしれません。
正面から見ると普通に服を着ていますが、最後に背中が映ると貧ぼっちゃま状態の方が面白かったかもしれませんね。
何も思い浮かばないのはアームが移動しないからだと思うので、こんな感じにしたいと思います。
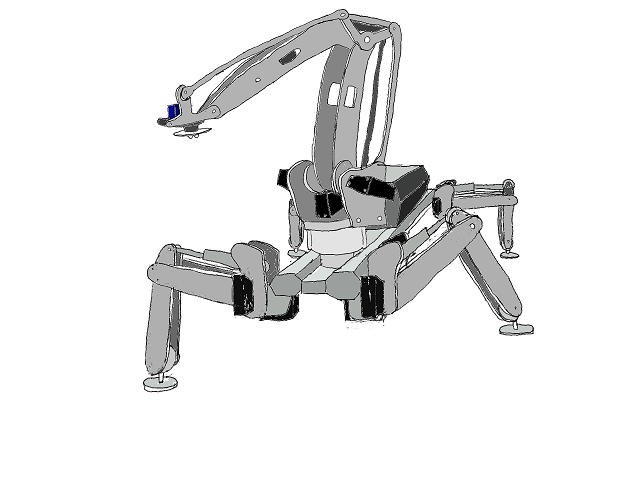
と言うわけで市販の四脚ロボットを調べてみました。
まずこの製品は5万円ですか・・・・無理そうですね。
どうにもサーボが高いらしい。何でコマンド式サーボはこんなに高いのだろうか?
各脚に2自由度ずつしか自由度がないのは少し厳しいですね。
各脚に3自由度あるロボットもあるみたいですが18万円は論外です。
プラズマカーなんかどうだろうかと思いましたが、あんな揺れる乗り物に載せるのは難しそうなのでやめておきます。制御と言う意味では面白そうなのですがね。
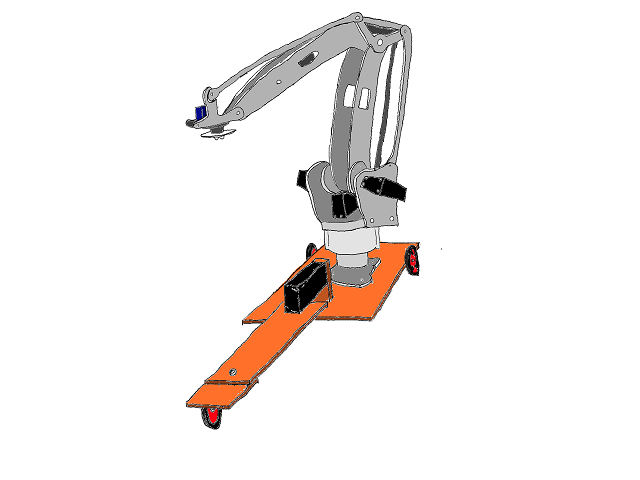
仕方ないのでキャタピラで妥協します。
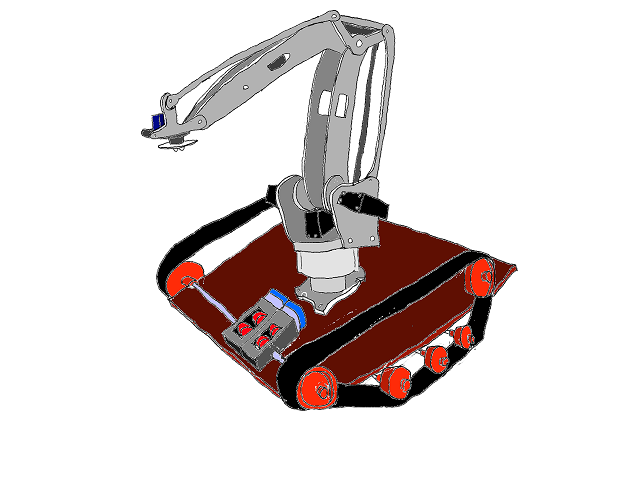
やる気がないせいかいつも以上に雑に書いてしまいました。
単にゲームのコントローラー等で操作できるようにするだけでは面白くありません。
そこで自動的に対象物の近くまで移動してアームの先端を対象物まで移動させるという制御をしようと思った場合を考えてみましょう。
まずクローラーは非ホロノミック系のシステムだと思うので目的地まで移動させるのは簡単ではないです。
それ以前にどうやって自己位置推定をするかを考えると、
つまり、
測域センサとかあれば適当に動き回って対象物と似たような形状の物体があればそこまで移動するとかできそうですが持っていないのでできません。
とりあえずロボットだけ作ってみました。
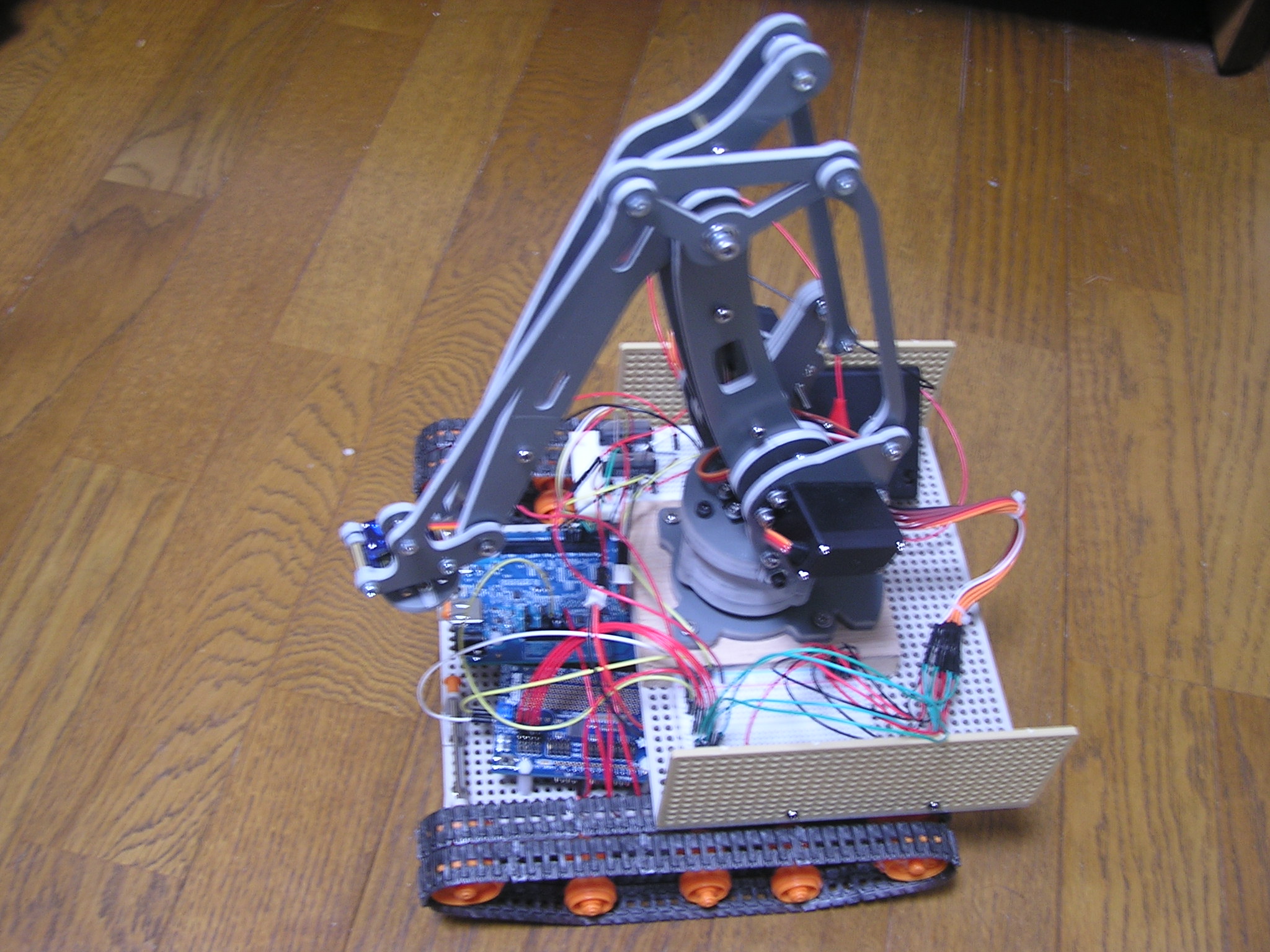
なんだか絵と違いますが、ちょっとEdisonの基盤がでかすぎたので二段になってしまいました。
これならBreakout Boardの方を買えば良かったかもしれないです。
クローラーのモーター制御のRTCはここ、PCA9685の操作RTCはここに置いておきます。
クローラーのモーターはモータードライバICで制御します。モータドライバICへの入力はEdisonのGPIOから直接入力しますが、ロボットアームのサーボモータへの入力はPCA9685にI2Cで通信してからPCA9685からPWMを入力しています。
結果的にクローラーの制御RTCとロボットアームの制御RTCを切り離せたのは良かったかもしれないですね。
それからArduinoから直接ロボットアームが制御できるようにRTnoで動作するサーボモーター制御RTCを作っておいたので、Edisonを持っていなくてもこれとアーム制御RTC、操作用GUIのRTCを使えば普通のPCとArduinoでロボットアームの制御ができます。
とりあえず、今は制御をどうするかを考えている所です。
思いついたらまた書きます。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

前回に記事の中でふざけている所が一箇所あります。
さてどこでしょうか?
ちょっと脱がせ方が安易だったかもしれません。
正面から見ると普通に服を着ていますが、最後に背中が映ると貧ぼっちゃま状態の方が面白かったかもしれませんね。
何も思い浮かばないのはアームが移動しないからだと思うので、こんな感じにしたいと思います。
と言うわけで市販の四脚ロボットを調べてみました。
まずこの製品は5万円ですか・・・・無理そうですね。
どうにもサーボが高いらしい。何でコマンド式サーボはこんなに高いのだろうか?
各脚に2自由度ずつしか自由度がないのは少し厳しいですね。
各脚に3自由度あるロボットもあるみたいですが18万円は論外です。
プラズマカーなんかどうだろうかと思いましたが、あんな揺れる乗り物に載せるのは難しそうなのでやめておきます。制御と言う意味では面白そうなのですがね。
仕方ないのでキャタピラで妥協します。
やる気がないせいかいつも以上に雑に書いてしまいました。
単にゲームのコントローラー等で操作できるようにするだけでは面白くありません。
そこで自動的に対象物の近くまで移動してアームの先端を対象物まで移動させるという制御をしようと思った場合を考えてみましょう。
まずクローラーは非ホロノミック系のシステムだと思うので目的地まで移動させるのは簡単ではないです。
それ以前にどうやって自己位置推定をするかを考えると、
- オドメトリ → エンコーダを持ってないため不可
- マーカーを付けてカメラで計測 → カメラは縛っているので不可
- 加速度センサで計測した値を二重積分、ジャイロセンサで計測した値を積分 → どうだろう?
- GPS→そんな広い範囲を動くわけではないのであまり向いてないように思う
つまり、
- 車輪の速度制御ができない
- 加速度センサ、ジャイロセンサで計測した値を積分するので相当な誤差が生じる
測域センサとかあれば適当に動き回って対象物と似たような形状の物体があればそこまで移動するとかできそうですが持っていないのでできません。
とりあえずロボットだけ作ってみました。
なんだか絵と違いますが、ちょっとEdisonの基盤がでかすぎたので二段になってしまいました。
これならBreakout Boardの方を買えば良かったかもしれないです。
クローラーのモーター制御のRTCはここ、PCA9685の操作RTCはここに置いておきます。
クローラーのモーターはモータードライバICで制御します。モータドライバICへの入力はEdisonのGPIOから直接入力しますが、ロボットアームのサーボモータへの入力はPCA9685にI2Cで通信してからPCA9685からPWMを入力しています。
結果的にクローラーの制御RTCとロボットアームの制御RTCを切り離せたのは良かったかもしれないですね。
それからArduinoから直接ロボットアームが制御できるようにRTnoで動作するサーボモーター制御RTCを作っておいたので、Edisonを持っていなくてもこれとアーム制御RTC、操作用GUIのRTCを使えば普通のPCとArduinoでロボットアームの制御ができます。
とりあえず、今は制御をどうするかを考えている所です。
思いついたらまた書きます。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
ちょっと前回の記事はふざけ過ぎました。
突っ込み不在の恐怖がどれだけ恐ろしいかを身をもって体験することになりました。
と言うか誰か突っ込んでくださいよ。
そういえば以前メディアアートでやりたい事があると言ったと思いますが、こんな事をやってみたいと思っています。
確かタイタニアというアニメでポーカーをするときにこんな事をしていたような気がしますが、見たのが何年も前なのでうろ覚えです。
光の玉らしきものが詰まっている容器に手を入れると指に光の玉がくっつきます。
そして手前の器に取った光の玉を入れるとカードになります。
これをやりたい、というより誰かにやってほしいと思っています。
ちなみにVRは使わない方向でお願いします。
あと、手に何か装着するとなると負けたような感じがするので、それも縛る方向でお願いします。
つまりこれみたいな空中ディスプレイを使ってほしいです。
価格を調べてみたのですが、130万円ですか・・・僕には縁のない話だったみたいです。
3000ドルとか4000ドルと書いてあるサイトもありましたが、どちらにせよ手の出せる価格ではないです。3万円以下まで値段が下がるまで待つ事にします。下がるわけないだろ
そういえばRTMコンテストで空中ディスプレイを使った作品なんて見たことないので、やってみたら面白そうだと思いますけどね。色々なデバイスで操作できると便利そうです。賞金10万円のために130万円出せる人がいればですけど。
やはりVRを使うか手に何か付けるかしかないか。
まあ別にメディアアートに関しては他にもアイデアはあるので色々考えていきたいと思います。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
突っ込み不在の恐怖がどれだけ恐ろしいかを身をもって体験することになりました。
と言うか誰か突っ込んでくださいよ。
そういえば以前メディアアートでやりたい事があると言ったと思いますが、こんな事をやってみたいと思っています。
確かタイタニアというアニメでポーカーをするときにこんな事をしていたような気がしますが、見たのが何年も前なのでうろ覚えです。
光の玉らしきものが詰まっている容器に手を入れると指に光の玉がくっつきます。
そして手前の器に取った光の玉を入れるとカードになります。
これをやりたい、というより誰かにやってほしいと思っています。
ちなみにVRは使わない方向でお願いします。
あと、手に何か装着するとなると負けたような感じがするので、それも縛る方向でお願いします。
つまりこれみたいな空中ディスプレイを使ってほしいです。
価格を調べてみたのですが、130万円ですか・・・僕には縁のない話だったみたいです。
3000ドルとか4000ドルと書いてあるサイトもありましたが、どちらにせよ手の出せる価格ではないです。3万円以下まで値段が下がるまで待つ事にします。下がるわけないだろ
そういえばRTMコンテストで空中ディスプレイを使った作品なんて見たことないので、やってみたら面白そうだと思いますけどね。色々なデバイスで操作できると便利そうです。賞金10万円のために130万円出せる人がいればですけど。
やはりVRを使うか手に何か付けるかしかないか。
まあ別にメディアアートに関しては他にもアイデアはあるので色々考えていきたいと思います。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
そういえば何故RTCを分割することになったか言っていませんでした。
EdisonのPWMではラジコン用サーボが14度刻みぐらいでしか制御できないので、他のデバイスを介して制御する必要があるからです。
Edisonから直接制御できるのであれば単一のRTCで構わない、他の方法でやりたい人は自分でソースコード書いてくださいで良かったと思うのですが、こうなるとこちらが特定の製品を使うように指定するよりも自由度があった方がいいかなと思いました。
と言うよりもロボットアームを買う前にラジコン用サーボの動作確認をもっと入念にしておくべきでした。
動いたで終わりにしてたのがまずかったみたいです。
それはさておきアームを使って何をするかを考えます。
まずはアームにコロコロを持たせて服についた猫の毛等を取ってもらう装置を考えました。
一家に一台あれば便利だと思います。
僕の家でも上の絵で書いた猫ともう一匹猫を飼っているので大いに役立つと思います。
これは流行るかもしれないです。
そして前の記事で提案した煙草に火を付ける装置も絵にしてみたのですが重大な問題点がある事に気づきました。

ライターに火を点けたら炎センサが反応するので、煙草に火が点いたかどうかを炎センサで確認することはできません。
危ない危ない。今から作ろうと思っていただけに気づいて良かったです。皆さんも何かアイデアを思いついた時はまず絵に描いてみましょう。
ちょっと今日は真面目すぎたかもしれないです。
次からはもう少しボケをかます程度の内容で書きたいと思います。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
EdisonのPWMではラジコン用サーボが14度刻みぐらいでしか制御できないので、他のデバイスを介して制御する必要があるからです。
Edisonから直接制御できるのであれば単一のRTCで構わない、他の方法でやりたい人は自分でソースコード書いてくださいで良かったと思うのですが、こうなるとこちらが特定の製品を使うように指定するよりも自由度があった方がいいかなと思いました。
と言うよりもロボットアームを買う前にラジコン用サーボの動作確認をもっと入念にしておくべきでした。
動いたで終わりにしてたのがまずかったみたいです。
それはさておきアームを使って何をするかを考えます。
まずはアームにコロコロを持たせて服についた猫の毛等を取ってもらう装置を考えました。
一家に一台あれば便利だと思います。
僕の家でも上の絵で書いた猫ともう一匹猫を飼っているので大いに役立つと思います。
これは流行るかもしれないです。
そして前の記事で提案した煙草に火を付ける装置も絵にしてみたのですが重大な問題点がある事に気づきました。
ライターに火を点けたら炎センサが反応するので、煙草に火が点いたかどうかを炎センサで確認することはできません。
危ない危ない。今から作ろうと思っていただけに気づいて良かったです。皆さんも何かアイデアを思いついた時はまず絵に描いてみましょう。
ちょっと今日は真面目すぎたかもしれないです。
次からはもう少しボケをかます程度の内容で書きたいと思います。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
非常に不本意ですがRTCを2つに分割しました。
サーボモータ制御RTCとそれ以外のRTCに分けました。
これでサーボモータ制御RTCの方は他と取り換えるのが簡単になるので、例えばRTnoでサーボモータ制御のRTCを作成すると別にEdisonを使わなくても普通のPCとarduinoで同じようにロボットアームを制御できます。後は誰かPCA9685のRTCを作ってください。
・・・・いよいよEdison使う意味が分からなくなってきたなあ。
題材が悪かったかもしれないです。移動ロボットなら意味はあったかもしれないです。
ただ、多関節ロボットの方がロマンがあるので仕方がないと思っています。
とりあえず同期していないと困るので複合コンポーネントにしてみたのですが、RTシステムエディタで非アクティブ化しようとするとフリーズします。
そういえばちょっと前のメーリングリストでバグがあるとか何とか書いてあったような気がしますが、よく覚えていません。
そう言えば例のRTCを管理するRTCでアクティブ化したときに同じネームサービスに登録されたRTCをまとめてアクティブ化、非アクティブ化しようとするとフリーズしていたように思うので、わざわざ別スレッドで処理させています。時間がかかり過ぎると駄目と言う事なのでしょうか?と言うかそれ以前にメーリングリストのは非アクティブ化するのに時間が余計にかかるとか言う話だったような気もします。
まあよくわからんけど1.1.1では改善されていると思うので余り気にしないことにします。
何と言うかEdisonはArduinoキットの方が初心者向きな印象です。
Breakout Boardキットは何をするにも電圧変換が必要になるみたいなのでちょっと面倒臭そうです。
ただArduinoキットはやたらサイズが大きくてEdisonの小ささを台無しにしているので人気が無いのだろうなあ。最初の練習ぐらいにはこちらの方が良いとは思いますけどね。
色々いらない話をしてしまいましたけど、結局ここからどうしましょうね?
何か他のデバイスを使いたいところですが、カメラを使うのは普通すぎるのでやめておきます。
とりあえず使いたいセンサを2つ選んでみました。
まずは炎センサです。
煙草に火をつけてくれるロボットを作るとして、火がついたかどうか確認するために使います。
人間に火を付けそうなのでかなり怖いですが、僕はタバコを吸わないので使わないと思います。
次に紫外線センサです。
紫外線を感じると日傘をさしてくれるロボットを作る際に使います。
そもそも日傘自体持っていないので役に立つかは知りません。
そろそろ勘のいい人なら気付いたかもしれませんが、実は何のアイデアもありません。
もうすこし考えてみます。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
サーボモータ制御RTCとそれ以外のRTCに分けました。
これでサーボモータ制御RTCの方は他と取り換えるのが簡単になるので、例えばRTnoでサーボモータ制御のRTCを作成すると別にEdisonを使わなくても普通のPCとarduinoで同じようにロボットアームを制御できます。後は誰かPCA9685のRTCを作ってください。
・・・・いよいよEdison使う意味が分からなくなってきたなあ。
題材が悪かったかもしれないです。移動ロボットなら意味はあったかもしれないです。
ただ、多関節ロボットの方がロマンがあるので仕方がないと思っています。
とりあえず同期していないと困るので複合コンポーネントにしてみたのですが、RTシステムエディタで非アクティブ化しようとするとフリーズします。
そういえばちょっと前のメーリングリストでバグがあるとか何とか書いてあったような気がしますが、よく覚えていません。
そう言えば例のRTCを管理するRTCでアクティブ化したときに同じネームサービスに登録されたRTCをまとめてアクティブ化、非アクティブ化しようとするとフリーズしていたように思うので、わざわざ別スレッドで処理させています。時間がかかり過ぎると駄目と言う事なのでしょうか?と言うかそれ以前にメーリングリストのは非アクティブ化するのに時間が余計にかかるとか言う話だったような気もします。
まあよくわからんけど1.1.1では改善されていると思うので余り気にしないことにします。
何と言うかEdisonはArduinoキットの方が初心者向きな印象です。
Breakout Boardキットは何をするにも電圧変換が必要になるみたいなのでちょっと面倒臭そうです。
ただArduinoキットはやたらサイズが大きくてEdisonの小ささを台無しにしているので人気が無いのだろうなあ。最初の練習ぐらいにはこちらの方が良いとは思いますけどね。
色々いらない話をしてしまいましたけど、結局ここからどうしましょうね?
何か他のデバイスを使いたいところですが、カメラを使うのは普通すぎるのでやめておきます。
とりあえず使いたいセンサを2つ選んでみました。
まずは炎センサです。
煙草に火をつけてくれるロボットを作るとして、火がついたかどうか確認するために使います。
人間に火を付けそうなのでかなり怖いですが、僕はタバコを吸わないので使わないと思います。
次に紫外線センサです。
紫外線を感じると日傘をさしてくれるロボットを作る際に使います。
そもそも日傘自体持っていないので役に立つかは知りません。
そろそろ勘のいい人なら気付いたかもしれませんが、実は何のアイデアもありません。
もうすこし考えてみます。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
ここを読んでもらえば分かると思うのですが、EdisonはPWMを256段階しか出せないらしいです。
つまりはPWMの周期20msの1~2msで180度回転するとして、約14度刻みでしか回転できないと言う事になりますかね?
ちなみに前々回撮った動画はPWMの周期を10msにして無理やり滑らかにしています。ラジコン用サーボはよく知らないのですけど、大丈夫なのですかね?
さすがにまずいと言うか、それでも7度刻みなのでこれにI2Cで通信する事にします。この製品ってEdison kit for Arduinoにも取り付けられるのだろうか?
と言いたいところですが、僕はこの製品を持っていないのでとりあえず手元にあるarduinoで代用します。arduinoをI2Cのスレーブにしてデータを受信するとサーボモータを制御するようにプログラムを作りました。皆さんが同じようなロボットを制御するときは上記の製品に置き換えてください。今の状態だとarduinoだけ使えとか言われそうですね。
正直なところ前との違いが分からないのですが、動きが滑らかになったような気がしなくもないです。
とりあえずEdisonに実装したRTCのソースコード、Arduinoに書き込んだソースコードはここに置いておきます。
Edisonのチップの表面には「What Will You Make?」と書いてある訳ですが、こっちが教えてほしいです。何を作ってほしいのですか?
何だか書くこともないので今日はこの辺にしておきます。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
つまりはPWMの周期20msの1~2msで180度回転するとして、約14度刻みでしか回転できないと言う事になりますかね?
ちなみに前々回撮った動画はPWMの周期を10msにして無理やり滑らかにしています。ラジコン用サーボはよく知らないのですけど、大丈夫なのですかね?
さすがにまずいと言うか、それでも7度刻みなのでこれにI2Cで通信する事にします。この製品ってEdison kit for Arduinoにも取り付けられるのだろうか?
と言いたいところですが、僕はこの製品を持っていないのでとりあえず手元にあるarduinoで代用します。arduinoをI2Cのスレーブにしてデータを受信するとサーボモータを制御するようにプログラムを作りました。皆さんが同じようなロボットを制御するときは上記の製品に置き換えてください。今の状態だとarduinoだけ使えとか言われそうですね。
正直なところ前との違いが分からないのですが、動きが滑らかになったような気がしなくもないです。
とりあえずEdisonに実装したRTCのソースコード、Arduinoに書き込んだソースコードはここに置いておきます。
Edisonのチップの表面には「What Will You Make?」と書いてある訳ですが、こっちが教えてほしいです。何を作ってほしいのですか?
何だか書くこともないので今日はこの辺にしておきます。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・