ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
とりあえずRTMサマーキャンプは終了しました。
もう疲れた。
参加してみて分かったのですが、2日目、3日目の進捗状況なんて全く当てになりません。
僕も初参加なのでどこかの班で作業したくて参加登録もしていたのですが、何故か「進捗状況の悪い班に入れ」と言われたので様子を見ていたところ、2日目に進捗が悪いと思っていた班が次の日ぐらいになったらちゃんと形になっていたのでやることが無くなりました。
やることが無くなったので、適当に見回りながら邪魔やアドバイスをしました。
実質3日半ぐらいしかないので、まずは簡単な課題を設定する事が重要だとは思いました。
「この日はこれをやる」、「この日までにこれをやる」と残り日数からしなければならない作業を計算してもおそらく計算通りにはいかないので、確実に期限内にやれそうな課題を最初に設定して段階的に難しくした方が確実に動くものができるとは思っています。
G-ROBOTSを使う班が多かったのですが、そのG-ROBOTSのRTCがリンク切れで見つからなかったのは少し困りました。
幸いライブラリはあったので即席でG-ROBOTSのRTCを作成して何とかなりました。
個人的には自己紹介でもっと笑いを取りに行っても良かったとは思います。
ちょっとそれは残念な点だったかもしれません。
去年よりも講義が減っているのですが、正直なところ色々な人の話を聞いてはみたかったとは思っています。
RTMコンテスト2013で最優秀賞取った人の話とか聞いてみたいです。
というより僕はこの人に一度も会ったことがないので、どんな話をするのか興味があります。
もう眠いので寝ます。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

もう疲れた。
参加してみて分かったのですが、2日目、3日目の進捗状況なんて全く当てになりません。
僕も初参加なのでどこかの班で作業したくて参加登録もしていたのですが、何故か「進捗状況の悪い班に入れ」と言われたので様子を見ていたところ、2日目に進捗が悪いと思っていた班が次の日ぐらいになったらちゃんと形になっていたのでやることが無くなりました。
やることが無くなったので、適当に見回りながら邪魔やアドバイスをしました。
実質3日半ぐらいしかないので、まずは簡単な課題を設定する事が重要だとは思いました。
「この日はこれをやる」、「この日までにこれをやる」と残り日数からしなければならない作業を計算してもおそらく計算通りにはいかないので、確実に期限内にやれそうな課題を最初に設定して段階的に難しくした方が確実に動くものができるとは思っています。
G-ROBOTSを使う班が多かったのですが、そのG-ROBOTSのRTCがリンク切れで見つからなかったのは少し困りました。
幸いライブラリはあったので即席でG-ROBOTSのRTCを作成して何とかなりました。
個人的には自己紹介でもっと笑いを取りに行っても良かったとは思います。
ちょっとそれは残念な点だったかもしれません。
去年よりも講義が減っているのですが、正直なところ色々な人の話を聞いてはみたかったとは思っています。
RTMコンテスト2013で最優秀賞取った人の話とか聞いてみたいです。
というより僕はこの人に一度も会ったことがないので、どんな話をするのか興味があります。
もう眠いので寝ます。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
中央大学で開催されたRTM講習会に参加してきました。
また2部、3部を担当しました。
爆破予告があったらしく30分遅れての開始ということになったのですが、僕が遅刻したので45分ぐらい遅れての開始となりました。大変申し訳ございません。
疑っている人がいるかもしれませんが、僕は犯人ではありません。
講習会自体はあまり大きなトラブルもなく全員課題をクリアできました。
ROBOMECHの時にはとんでもないPC環境の人がいたのですが、今回は普通の環境の人ばかりでした。
もう少し課題を捻ってもよかったかもしれないです。
資料を見てもらえば分かるのですが、ちょっと余計な情報を詰め込みすぎたのは反省しています。
再来週はサマーキャンプなのですが、まだ空きはあるので暇な人は参加してみてください。
とは言っても、今から1週間予定が空く人がいるのかどうかは謎ですけど。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
また2部、3部を担当しました。
爆破予告があったらしく30分遅れての開始ということになったのですが、僕が遅刻したので45分ぐらい遅れての開始となりました。大変申し訳ございません。
疑っている人がいるかもしれませんが、僕は犯人ではありません。
講習会自体はあまり大きなトラブルもなく全員課題をクリアできました。
ROBOMECHの時にはとんでもないPC環境の人がいたのですが、今回は普通の環境の人ばかりでした。
もう少し課題を捻ってもよかったかもしれないです。
資料を見てもらえば分かるのですが、ちょっと余計な情報を詰め込みすぎたのは反省しています。
再来週はサマーキャンプなのですが、まだ空きはあるので暇な人は参加してみてください。
とは言っても、今から1週間予定が空く人がいるのかどうかは謎ですけど。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
早稲田大学で開催されたRTM講習会に参加してきました。
リンク先を見ての通り2部と3部を担当しました。
特にネタがなかったので実習はFlipコンポーネントを作るだけです。
説明が下手だった割には大きなトラブルがなかったのは運が良かったと思います。
早く終わった人は暇そうにしてたので何かおまけがあったほうが良かったかもしれません。
どうせ時間が余るのだったら、実行コンテキストやマネージャについて詳しく説明した方がよかったかもしれないです。多分ほとんどの人は理解できていないだろうし。
サマーキャンプは8月1日から8月5日まで開催されます。
予定が空いている人は参加してみてください。まだ12人も空いてます。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
リンク先を見ての通り2部と3部を担当しました。
特にネタがなかったので実習はFlipコンポーネントを作るだけです。
説明が下手だった割には大きなトラブルがなかったのは運が良かったと思います。
早く終わった人は暇そうにしてたので何かおまけがあったほうが良かったかもしれません。
どうせ時間が余るのだったら、実行コンテキストやマネージャについて詳しく説明した方がよかったかもしれないです。多分ほとんどの人は理解できていないだろうし。
サマーキャンプは8月1日から8月5日まで開催されます。
予定が空いている人は参加してみてください。まだ12人も空いてます。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
RTM講習会に参加してきましたが、正直見込みが甘かったように思います。
とにかく色々なトラブルが発生して、自作のRTCでロボットを操作できた人はほとんどいませんでした。
まず困ったのがTkJoyStickComp.pyが動作できない問題です。
これは起こるのではないかと思ってはいましたが、「多分大丈夫だろう」と思って対策はしませんでした。
ざっと数えただけでも6~7人ぐらいはいました。
原因として考えられるのは以下の通りです。
・Pythonインストール時にTkのチェックを外している
わざわざこんなことをする人はほとんどいないとは思いますが、Tkinterのインポートエラーが出るとしたらこれぐらいです。Python 2.7.0から2.7.10までのインストーラー、32bitと64bitの両方を実行して確認してみましたが、Tkinterはデフォルトでインストールされるようなので自分で設定を変更する以外にはあり得ません。
・OpenRTM-aistのPython版がインストールされていない
これが一番多かったのではないかと思います。
まあ確かに1.1.2にしろと強制したわけではないので、C++版の1.1.1以下をインストールしただけの人もいたのでしょう。
ただ講習会のページでPython版のインストールも指示しているようなので僕は悪くありません。
・Python版のRTCが実行できない
Pythonは64bit、OpenRTM-aistは32bitをインストールした場合などに発生します。
これは割とありがちなのかもしれないです。
あとEV3のネームサーバーが勝手に落ちるという現象がいくつか発生したそうです。
どうにも一度も接続したことのないPCとEV3が最初に接続したときの動作が怪しいように思います。
Ubuntuで接続できるか動作確認した際に似たような現象が発生しましたが、最初の一回発生しただけでそれ以降は発生しませんでした。
EV3を一回再起動すれば直る可能性もあるかもしれないです。
デバイスドライバの更新などを考えると、EV3は無線で接続した方がよかったかもしれないです。
ただそれをやるには人数が多すぎるので無理がありそうです。
IEEE802.11aとか使えばいけるかもしれませんが、それはそれで別の問題が発生しそうなのでやりたくありません。
参加した人には気の毒ですが、もう疲れたのでこの辺にしておきます。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
とにかく色々なトラブルが発生して、自作のRTCでロボットを操作できた人はほとんどいませんでした。
まず困ったのがTkJoyStickComp.pyが動作できない問題です。
これは起こるのではないかと思ってはいましたが、「多分大丈夫だろう」と思って対策はしませんでした。
ざっと数えただけでも6~7人ぐらいはいました。
原因として考えられるのは以下の通りです。
・Pythonインストール時にTkのチェックを外している
わざわざこんなことをする人はほとんどいないとは思いますが、Tkinterのインポートエラーが出るとしたらこれぐらいです。Python 2.7.0から2.7.10までのインストーラー、32bitと64bitの両方を実行して確認してみましたが、Tkinterはデフォルトでインストールされるようなので自分で設定を変更する以外にはあり得ません。
・OpenRTM-aistのPython版がインストールされていない
これが一番多かったのではないかと思います。
まあ確かに1.1.2にしろと強制したわけではないので、C++版の1.1.1以下をインストールしただけの人もいたのでしょう。
ただ講習会のページでPython版のインストールも指示しているようなので僕は悪くありません。
・Python版のRTCが実行できない
Pythonは64bit、OpenRTM-aistは32bitをインストールした場合などに発生します。
これは割とありがちなのかもしれないです。
あとEV3のネームサーバーが勝手に落ちるという現象がいくつか発生したそうです。
どうにも一度も接続したことのないPCとEV3が最初に接続したときの動作が怪しいように思います。
Ubuntuで接続できるか動作確認した際に似たような現象が発生しましたが、最初の一回発生しただけでそれ以降は発生しませんでした。
EV3を一回再起動すれば直る可能性もあるかもしれないです。
デバイスドライバの更新などを考えると、EV3は無線で接続した方がよかったかもしれないです。
ただそれをやるには人数が多すぎるので無理がありそうです。
IEEE802.11aとか使えばいけるかもしれませんが、それはそれで別の問題が発生しそうなのでやりたくありません。
参加した人には気の毒ですが、もう疲れたのでこの辺にしておきます。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
ネットワークアダプタが複数あると上手く通信できない事があるわけですが、31人もいると多分誰かはやらかすと考えています。
説明用スライドとチュートリアルのページにも書いてはいますが、一見して不具合が発生しているかが分かりづらいのが問題です。
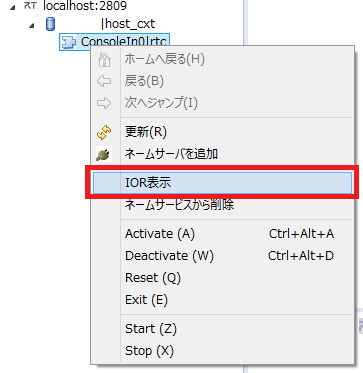
一応OpenRTP 1.1.2ではIORからオブジェクトの情報を表示してくれるので、それを見れば確認はできます。
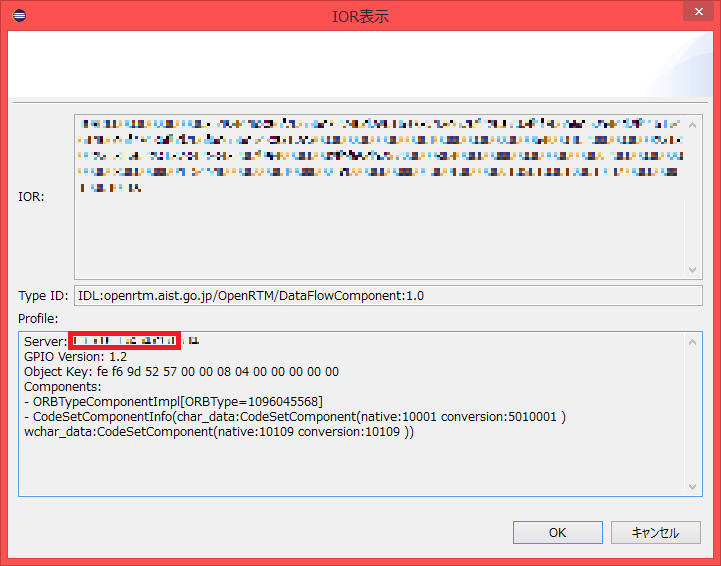
表示されたIPアドレスがEV3の場合は192.168.0.2、ラズパイマウスの場合は192.168.11.2(多分)になっていなければおそらく不具合が発生しています。
例えば無線LANで接続したネットワークでIPアドレス152.160.33.2が割り振られているとします。
この場合はEV3やラズパイからは到達できないIPアドレスなので、EV3やラズパイマウスからの通信は失敗します。
解決方法としては無線LAN等を切るか、あるいはrtc.confでエンドポイントを明示的に指定するかの方法があります。
corba.endpoint: 192.168.0.2:
ただ講習会に参加する方は初心者だと思うので、rtc.confをいじるのはあまりおすすめしません。
素直に無線LANを切断してください。
それからRTCをexitせずに×を押してプロセスを終了してRTシステムエディタが固まるということも絶対に誰かはやらかします。これは断言します。
相手のRTCとの通信が途切れている場合、PortBaseクラスのupdateConnectors関数が呼び出された時にコネクタが削除されます。updateConnectors関数はget_port_profile関数、get_connector_profiles関数、get_connector_profiles関数で呼び出されるので、RTシステムエディタでRTCを表示しているとこれらの操作を呼び出して勝手に削除します。
これが別のマシンのRTCと接続している場合に時間がかかる場合があるみたいです。
とりあえずrtc.confでCORBA通信のタイムアウトを設定したら切断するまでの時間が速くなったのですが、これはデフォルト値0のはずなのでむしろ遅くなるように思うので謎です。
corba.args: -ORBclientConnectTimeOutPeriod 5000
まあ普通にexitするかCtrl+Cで消せば大丈夫なのでそうしてください。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
説明用スライドとチュートリアルのページにも書いてはいますが、一見して不具合が発生しているかが分かりづらいのが問題です。
一応OpenRTP 1.1.2ではIORからオブジェクトの情報を表示してくれるので、それを見れば確認はできます。
表示されたIPアドレスがEV3の場合は192.168.0.2、ラズパイマウスの場合は192.168.11.2(多分)になっていなければおそらく不具合が発生しています。
例えば無線LANで接続したネットワークでIPアドレス152.160.33.2が割り振られているとします。
この場合はEV3やラズパイからは到達できないIPアドレスなので、EV3やラズパイマウスからの通信は失敗します。
解決方法としては無線LAN等を切るか、あるいはrtc.confでエンドポイントを明示的に指定するかの方法があります。
corba.endpoint: 192.168.0.2:
ただ講習会に参加する方は初心者だと思うので、rtc.confをいじるのはあまりおすすめしません。
素直に無線LANを切断してください。
それからRTCをexitせずに×を押してプロセスを終了してRTシステムエディタが固まるということも絶対に誰かはやらかします。これは断言します。
相手のRTCとの通信が途切れている場合、PortBaseクラスのupdateConnectors関数が呼び出された時にコネクタが削除されます。updateConnectors関数はget_port_profile関数、get_connector_profiles関数、get_connector_profiles関数で呼び出されるので、RTシステムエディタでRTCを表示しているとこれらの操作を呼び出して勝手に削除します。
これが別のマシンのRTCと接続している場合に時間がかかる場合があるみたいです。
とりあえずrtc.confでCORBA通信のタイムアウトを設定したら切断するまでの時間が速くなったのですが、これはデフォルト値0のはずなのでむしろ遅くなるように思うので謎です。
corba.args: -ORBclientConnectTimeOutPeriod 5000
まあ普通にexitするかCtrl+Cで消せば大丈夫なのでそうしてください。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・