ロボット、千葉ロッテマリーンズについていいかげんなことを書きます。
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
今回は計測と制御のミドルウェア特集号の感想を書きます。
「ROSの近況と今後の展望」と言う記事があるのですが、僕が読んだ限りでは今後の展望については一切書いていません。ROS2が普及するか、需要が本当にあるかどうかは一番知りたいところではあるので残念です。まあ、ROS2は普及しないと思いますけど。
なんだかこういう解説や論文になると途端にROSに対してネガティブな意見が出てくる。
今回多かったのは、「誰でも簡単にロボットが作れてしまうので、学生の教育に適していないかもしれない」と言う意見で、それはそうかもしれません。
まあでも、学生だったら自分が使っているライブラリの概要ぐらいは知っておいた方がいいとは思います。
学会発表とかで「それは外部のライブラリ(例えばgmapping)がやっているので分かりません」とか言ったら馬鹿にされるかもしれません。
ROSが使われているのは主に研究用途のため、学術分野から離れてしまうとROSの知識は全く役に立たなくなるかもしれないです。ROSが衰退した場合も同じです。10年後には消えている可能性も0ではありません。
あと宇宙機でROSを使おうとか言う解説もあったのですが、なんでもROSのコードを変換する必要があるらしいです。
そもそも、ROS等のミドルウェア依存の部分とコアの処理は別ファイルで切り離して実装するのが基本であり、移植したいのであればミドルウェア依存の部分だけを新規に作成するのが基本だと思います。コードを変換するツールを作っている時点で迷走しているような気がします。
例えば「ROSのコードをOpenRTM-aistに変換するツールを作りました」とか言い始めたら途端に話はおかしくなるわけで、方向性を見失っています。これがROSのコードがそのまま使えるという話なら分かったのですが。

にほんブログ村のロボットのカテゴリから
全然人が来ない・・・

「ROSの近況と今後の展望」と言う記事があるのですが、僕が読んだ限りでは今後の展望については一切書いていません。ROS2が普及するか、需要が本当にあるかどうかは一番知りたいところではあるので残念です。まあ、ROS2は普及しないと思いますけど。
なんだかこういう解説や論文になると途端にROSに対してネガティブな意見が出てくる。
今回多かったのは、「誰でも簡単にロボットが作れてしまうので、学生の教育に適していないかもしれない」と言う意見で、それはそうかもしれません。
まあでも、学生だったら自分が使っているライブラリの概要ぐらいは知っておいた方がいいとは思います。
学会発表とかで「それは外部のライブラリ(例えばgmapping)がやっているので分かりません」とか言ったら馬鹿にされるかもしれません。
ROSが使われているのは主に研究用途のため、学術分野から離れてしまうとROSの知識は全く役に立たなくなるかもしれないです。ROSが衰退した場合も同じです。10年後には消えている可能性も0ではありません。
あと宇宙機でROSを使おうとか言う解説もあったのですが、なんでもROSのコードを変換する必要があるらしいです。
そもそも、ROS等のミドルウェア依存の部分とコアの処理は別ファイルで切り離して実装するのが基本であり、移植したいのであればミドルウェア依存の部分だけを新規に作成するのが基本だと思います。コードを変換するツールを作っている時点で迷走しているような気がします。
例えば「ROSのコードをOpenRTM-aistに変換するツールを作りました」とか言い始めたら途端に話はおかしくなるわけで、方向性を見失っています。これがROSのコードがそのまま使えるという話なら分かったのですが。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
PR
ものすごく今更ですが、サマーキャンプの感想を書きます。
書く気はあったのですが、やる気が出なかったため更新が滞りました。
なんだか嫌味を言われそうなので更新します。
まあ、みんな動いたのはよかったと思います。
なんだか独自のデータ型を使う難易度が下がるどころか上がっているような気がします。
そもそも独自のデータ型を多用すること自体反対なのですが、タイムスタンプが無いデータ型が使えなくなったので、ひょっとしたら既存の独自データ型も使えなくなっている可能性があります。
あと、やっぱり班は所属バラバラで混ぜたほうがよさそうです。
今年は後はコンテストですが、Lua版RTMを超える作品が出てこないことを祈っています。
いや出てきたら出てきたで嬉しい誤算ではあるのですが、あれだけ去年から「来年は本気出す」とか言ってて負けたら恥ずかしいです。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
書く気はあったのですが、やる気が出なかったため更新が滞りました。
なんだか嫌味を言われそうなので更新します。
まあ、みんな動いたのはよかったと思います。
なんだか独自のデータ型を使う難易度が下がるどころか上がっているような気がします。
そもそも独自のデータ型を多用すること自体反対なのですが、タイムスタンプが無いデータ型が使えなくなったので、ひょっとしたら既存の独自データ型も使えなくなっている可能性があります。
あと、やっぱり班は所属バラバラで混ぜたほうがよさそうです。
今年は後はコンテストですが、Lua版RTMを超える作品が出てこないことを祈っています。
いや出てきたら出てきたで嬉しい誤算ではあるのですが、あれだけ去年から「来年は本気出す」とか言ってて負けたら恥ずかしいです。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
豪雨災害の一連の報道を見て気づいたのですが、関東の人の中には以下のような序列があるみたいです。
関東
近畿
東海
北海道 九州 タイ
中国 北陸
~~~~~~~~~~~~~
越えられない壁
~~~~~~~~~~~~~
四国
愛媛よりもタイの少年たちの方が重要だということが、今回のことでよく分かりました。
それはさておき、7月6日のRTM講習会の感想を書きます。
RTC Builderのバグだけはちょっと想定外だったのですが、それ以外は大きなトラブルは起こりませんでした。なので、書くこともあまりありません。
名城大の講習会は参加者少数のため実施しなかったらしいのですが、この内容の講習は本来であれば何万円も取られるので、受講した方が得だと思いますよ?例えば、ポリテクセンターのRTM講習会だと25000円取られます。
なんだか、某大学院でRTMを使う授業があるのですが、Twitterで「もうOpenRTMはほんと無理」とか言っている人がいるのですが、若干誤解している部分もあるのではないかと思います。と言うより、この人はVisual Studioのビルドの件もですが、誤解が多いです。誰か誤解を解いてあげてください。お願いします。
まず、ROSはgit cloneしてからcatkin_makeするだけでビルドできるので楽だというのは、別にOpenRTMもgit cloneしてcmake、cmake --buildするだけなので、別にそれについては言うほどの大差はないです。
確かにパッケージを管理する仕組みが弱いのはその通りなので、それはOpenRTM-aist 2.0では改善されることを期待しましょう。
とは言っても、そんなに都合よく改善されるかと言ったら、かなり怪しいです。
基本的に研究者が開発しているので、実験的な機能が優先になる傾向があります。
例えば、マネージャ関連の機能とか、VxWorksの対応とか、ほとんどの人は使わないような機能です。
ユーザビリティに関わる部分の優先度は低いので、ROS並みに使いやすくなるのはかなり先の話だろうとは思います。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
愛媛よりもタイの少年たちの方が重要だということが、今回のことでよく分かりました。
それはさておき、7月6日のRTM講習会の感想を書きます。
RTC Builderのバグだけはちょっと想定外だったのですが、それ以外は大きなトラブルは起こりませんでした。なので、書くこともあまりありません。
名城大の講習会は参加者少数のため実施しなかったらしいのですが、この内容の講習は本来であれば何万円も取られるので、受講した方が得だと思いますよ?例えば、ポリテクセンターのRTM講習会だと25000円取られます。
なんだか、某大学院でRTMを使う授業があるのですが、Twitterで「もうOpenRTMはほんと無理」とか言っている人がいるのですが、若干誤解している部分もあるのではないかと思います。と言うより、この人はVisual Studioのビルドの件もですが、誤解が多いです。誰か誤解を解いてあげてください。お願いします。
まず、ROSはgit cloneしてからcatkin_makeするだけでビルドできるので楽だというのは、別にOpenRTMもgit cloneしてcmake、cmake --buildするだけなので、別にそれについては言うほどの大差はないです。
確かにパッケージを管理する仕組みが弱いのはその通りなので、それはOpenRTM-aist 2.0では改善されることを期待しましょう。
とは言っても、そんなに都合よく改善されるかと言ったら、かなり怪しいです。
基本的に研究者が開発しているので、実験的な機能が優先になる傾向があります。
例えば、マネージャ関連の機能とか、VxWorksの対応とか、ほとんどの人は使わないような機能です。
ユーザビリティに関わる部分の優先度は低いので、ROS並みに使いやすくなるのはかなり先の話だろうとは思います。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
北九州は手榴弾が落ちていると聞いていたので期待していたのですが、そんなことはありませんでした。
小倉から松山に行く船に乗ったら、騙されてエスポワールに乗せられるのではないかと期待しているのですが、小倉から松山に行く機会がないので確認できていません。
今年もROBOMECH2018でRTM講習会をやったわけですが、まあいろいろ失敗しました。
WEBページの資料に書いたことがスライドに書いてなかったりしたのは少し問題だったかもしれません。あとWindowsとUbuntuの両方に対応するのは大変。
来年は広島らしいので、中国地方2回目のRTM講習会になる予定です。
ちなみに四国では一度も開催したことがありません。64回開催して0回です。
最終手段としてSICEの四国支部学術講演会で発表して開催してほしい人を探すという事も考えているのですが、11月だからどちらにしてもだいぶ先の話です。
SI2019は香川らしいけど、SIでは講習会はやってないからなあ。
まあどちらにしても、今年中に実現するのは無理そうです。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
小倉から松山に行く船に乗ったら、騙されてエスポワールに乗せられるのではないかと期待しているのですが、小倉から松山に行く機会がないので確認できていません。
今年もROBOMECH2018でRTM講習会をやったわけですが、まあいろいろ失敗しました。
WEBページの資料に書いたことがスライドに書いてなかったりしたのは少し問題だったかもしれません。あとWindowsとUbuntuの両方に対応するのは大変。
来年は広島らしいので、中国地方2回目のRTM講習会になる予定です。
ちなみに四国では一度も開催したことがありません。64回開催して0回です。
最終手段としてSICEの四国支部学術講演会で発表して開催してほしい人を探すという事も考えているのですが、11月だからどちらにしてもだいぶ先の話です。
SI2019は香川らしいけど、SIでは講習会はやってないからなあ。
まあどちらにしても、今年中に実現するのは無理そうです。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
なんだかTwitterでOpenRTMは使いづらいみたいなことを言われてますが、これはいろんな人が言っています。
まあ確かにeclipseとかcmake-guiとかVisual Studioとかいろいろ起動するのは非常に面倒なのですが、別にcmake-guiとVisual Studioはコマンドで操作したら起動する必要はないです。
と言うか、eclipse以外何も起動せずに開発する方法はあります。
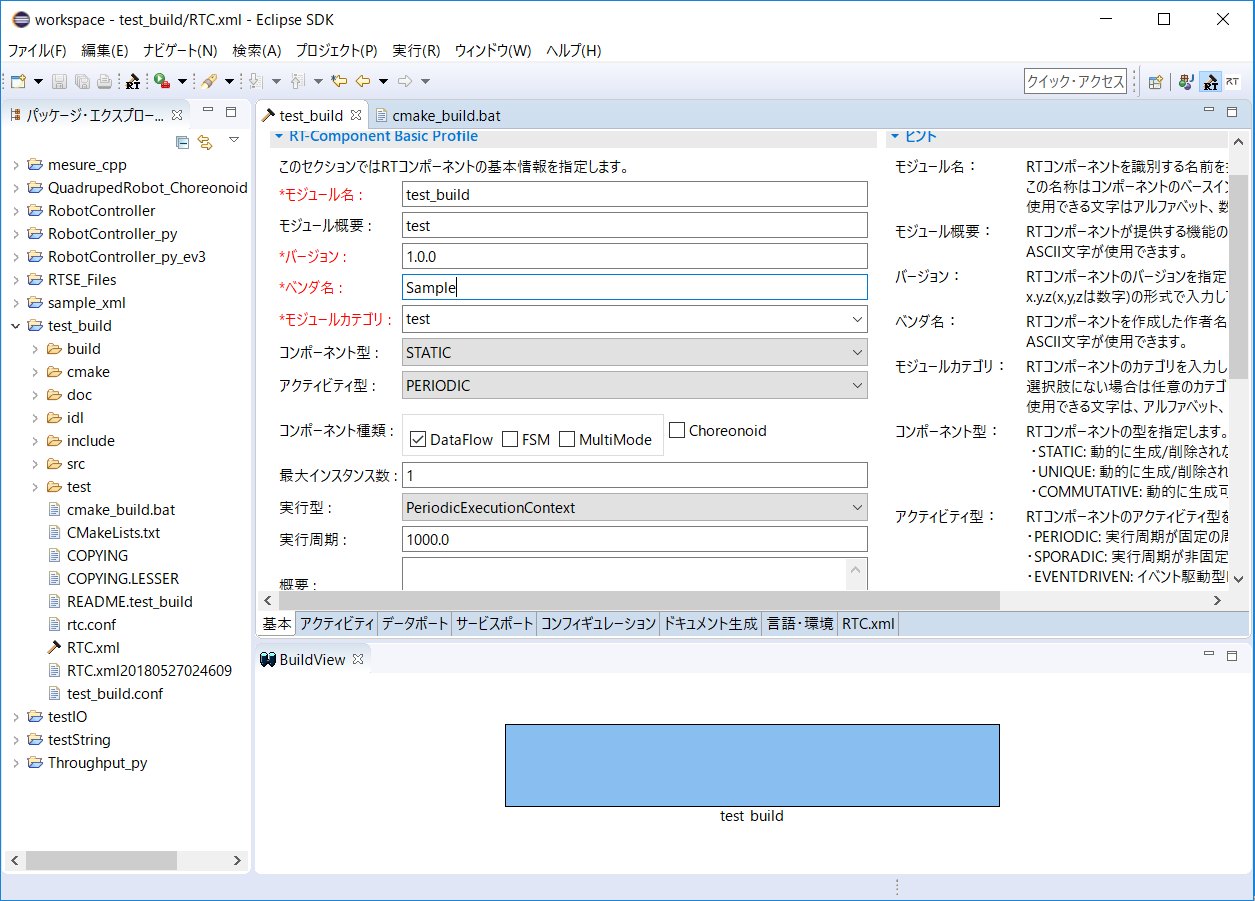
まずRTC Builderで適当にRTCを作成します。
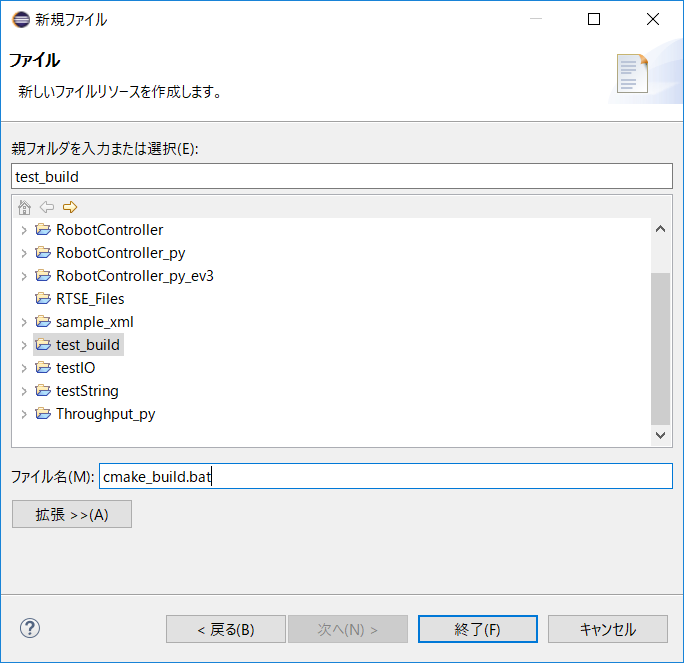
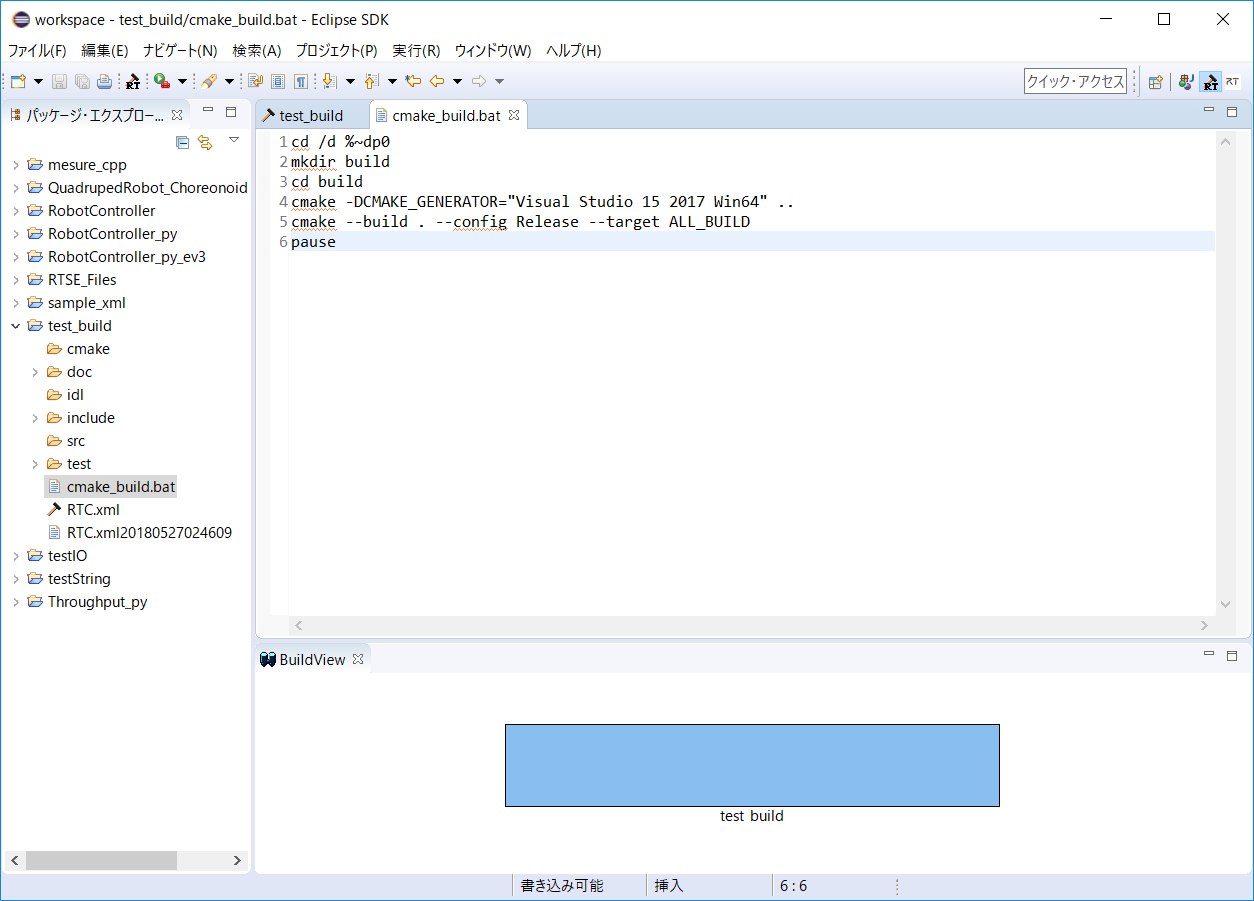
ここでCMakeを実行する必要があるわけですが、これは以下のコマンドを実行するバッチファイルを作れば一発でビルドできます。
cd /d %~dp0
mkdir build
cd build
cmake -DCMAKE_GENERATOR="Visual Studio 15 2017 Win64" ..
cmake --build . --config Release --target ALL_BUILD
pause
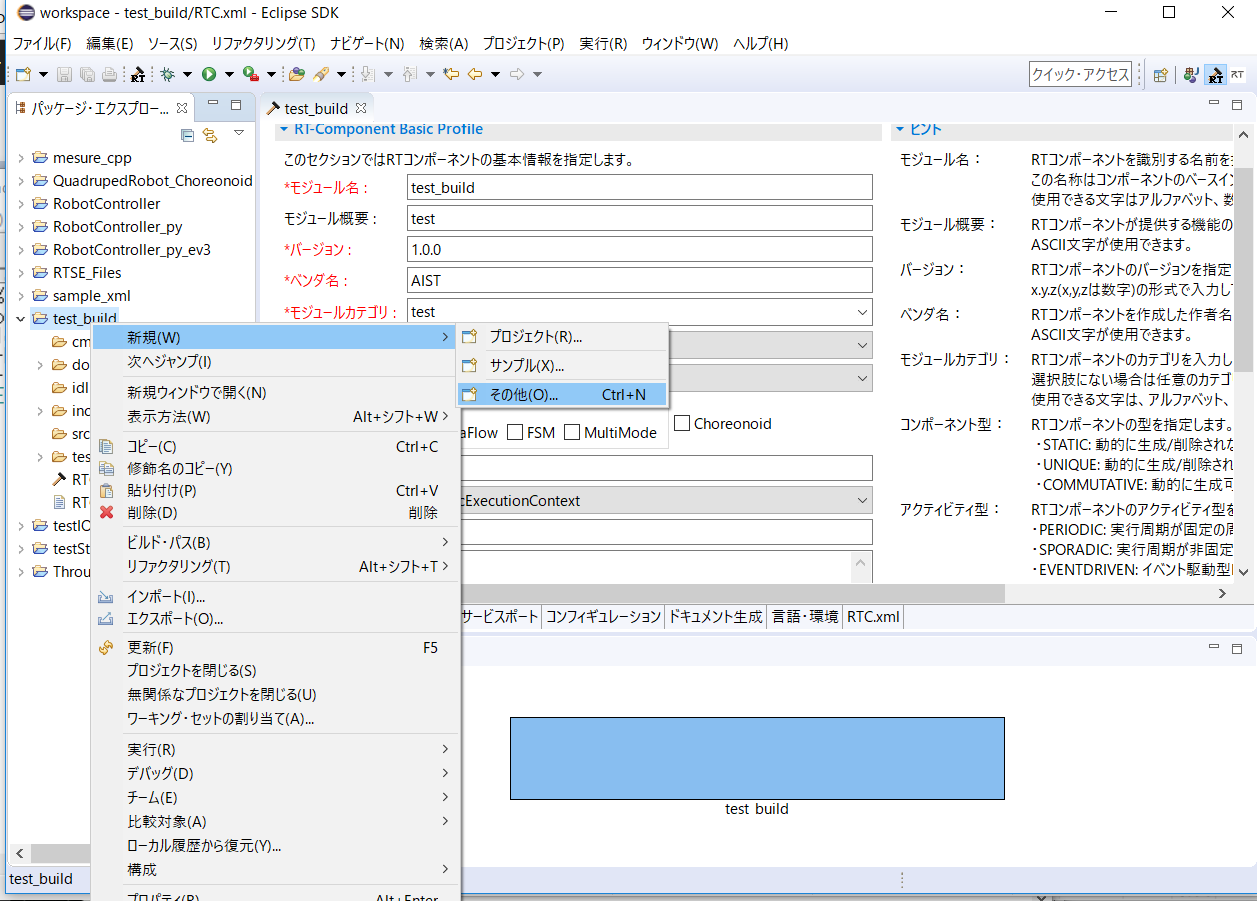
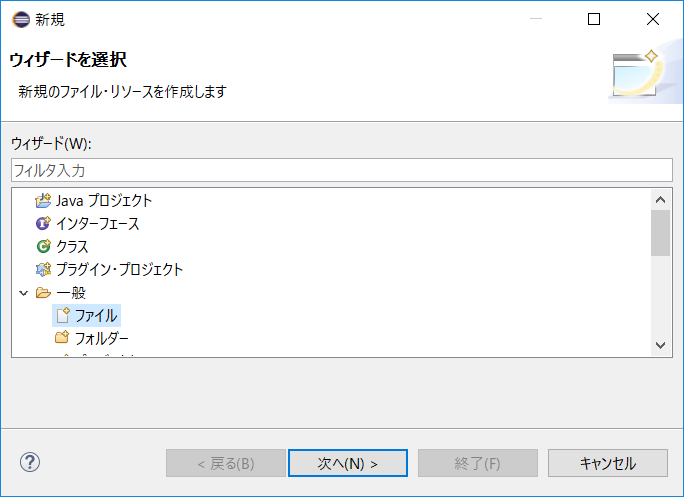
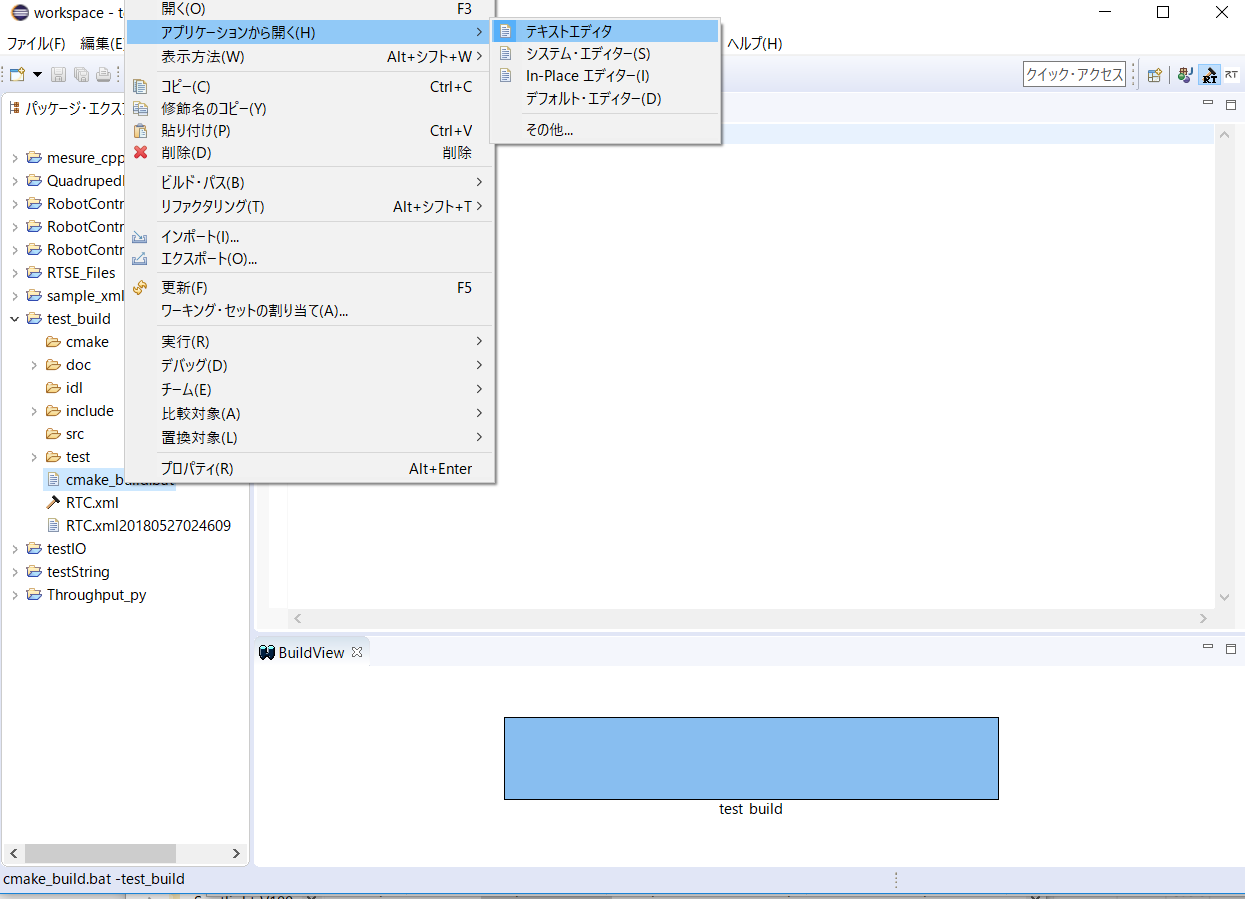
まず以下の手順でバッチファイル、もしくはシェルスクリプトを追加します。
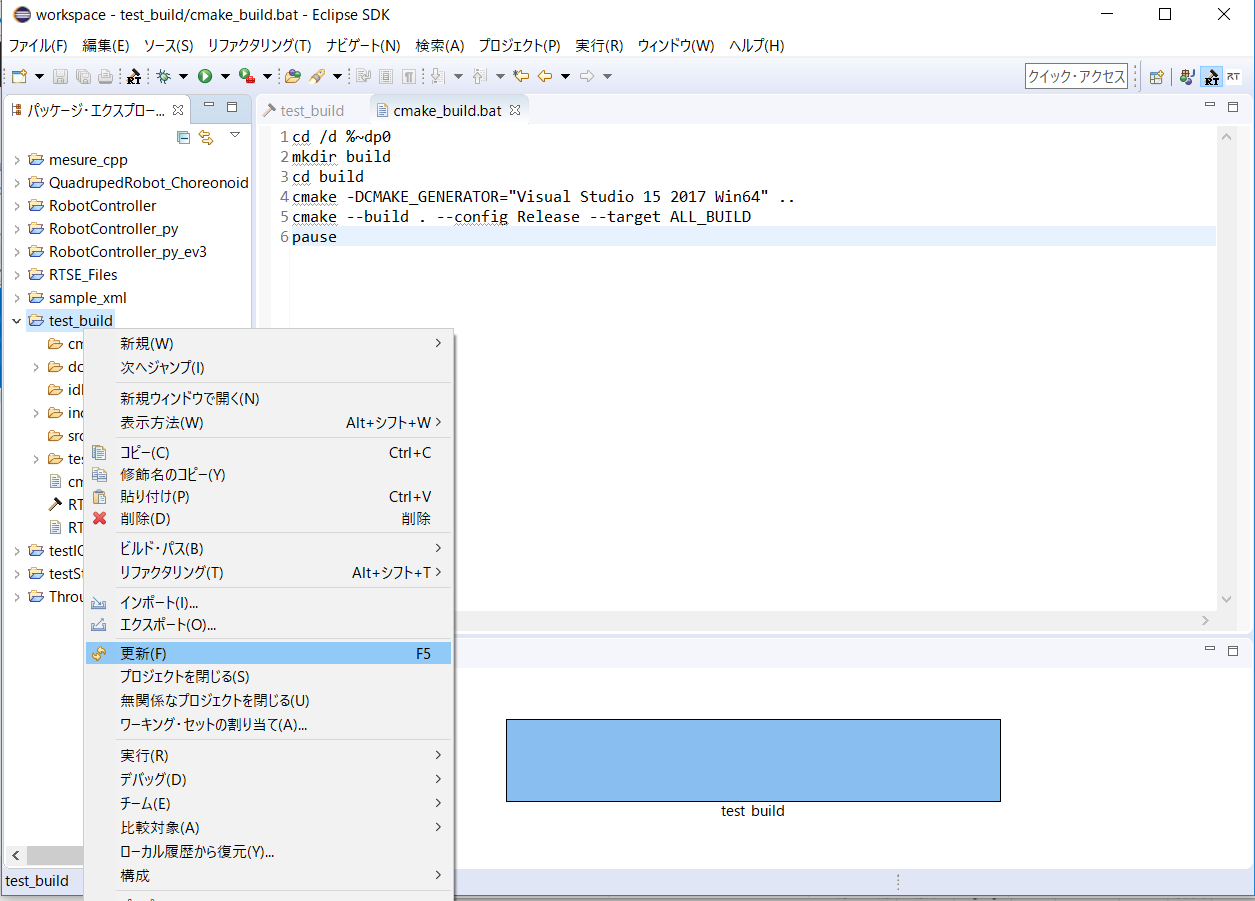
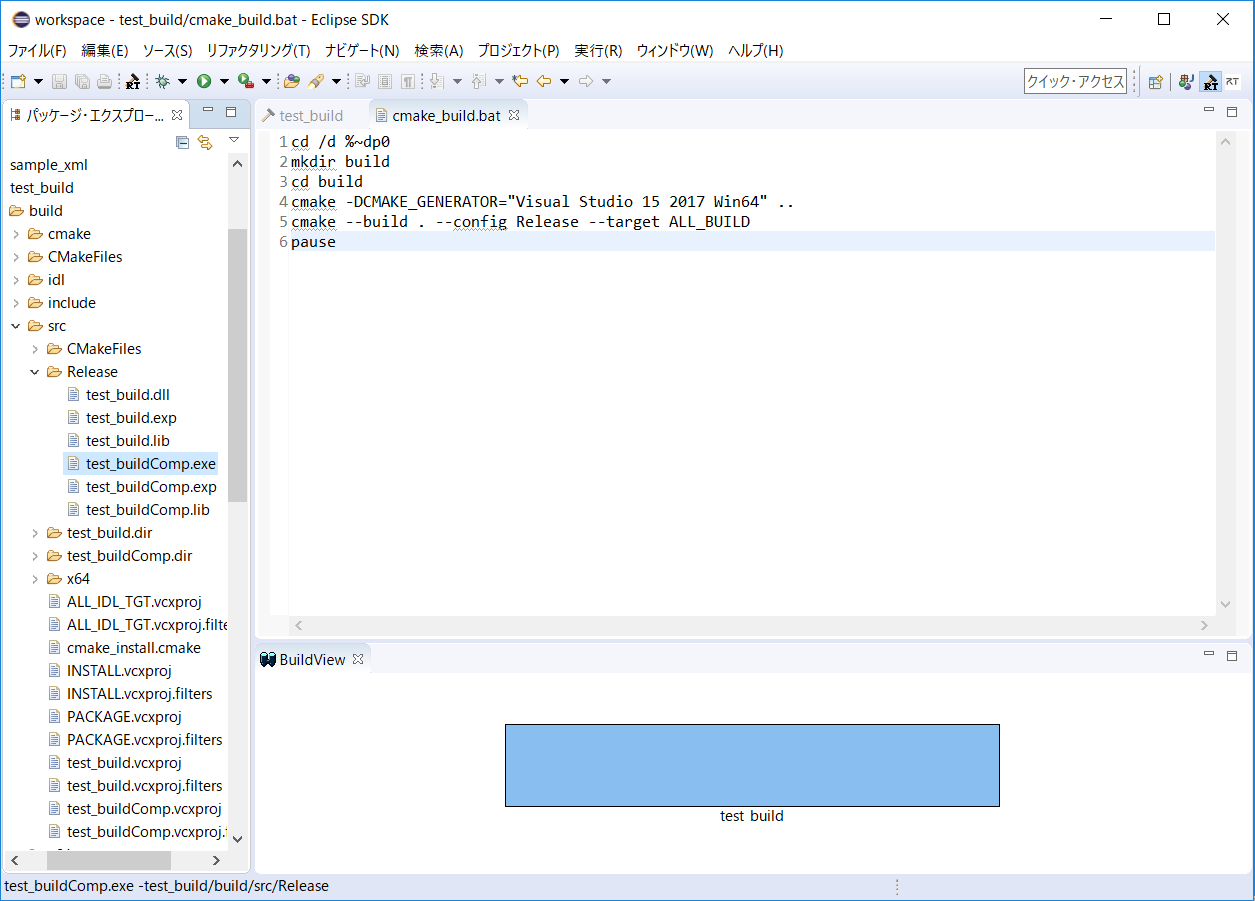
バッチファイルをダブルクリックして実行後、更新するとビルドして実行ファイルを生成します。ソースコードはeclipse上で適当に編集してください。
このファイル、というかコマンドを実行してくれるAntファイルを自動生成してくれれば楽なのですが、そんな気の利いた機能はRTC Builderにはありません。諦めてください。
この方法の問題点として、RT System Editor起動時にパッケージエクスプローラが消えてしまうため、RT System Editor起動時にRTCの起動ができないという事があるのですが、RT System Editorはそんなことは想定していません。諦めてください。
ただRTC起動時にコネクタを接続する方法はあるため、別にRT System Editorは必須ではないです。
Eclipse CDTでデバッグできたらいいような感じもしますが、どうせeclipse上でC/C++パースペクティブに切り替えなければならないのでVisual Studioを起動しても大差ないです。
結論を言うと、OpenRTM-aistが使いづらい原因の9割ぐらいはRTC Builder、RT System Editorにあるため、これがどうにかならないといかんともしがたいです。ユーザーの作業を減らそうという方向のようには見えないし、今後改善する見込みは薄いように思います。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・
まあ確かにeclipseとかcmake-guiとかVisual Studioとかいろいろ起動するのは非常に面倒なのですが、別にcmake-guiとVisual Studioはコマンドで操作したら起動する必要はないです。
と言うか、eclipse以外何も起動せずに開発する方法はあります。
まずRTC Builderで適当にRTCを作成します。
ここでCMakeを実行する必要があるわけですが、これは以下のコマンドを実行するバッチファイルを作れば一発でビルドできます。
cd /d %~dp0
mkdir build
cd build
cmake -DCMAKE_GENERATOR="Visual Studio 15 2017 Win64" ..
cmake --build . --config Release --target ALL_BUILD
pause
まず以下の手順でバッチファイル、もしくはシェルスクリプトを追加します。
バッチファイルをダブルクリックして実行後、更新するとビルドして実行ファイルを生成します。ソースコードはeclipse上で適当に編集してください。
このファイル、というかコマンドを実行してくれるAntファイルを自動生成してくれれば楽なのですが、そんな気の利いた機能はRTC Builderにはありません。諦めてください。
この方法の問題点として、RT System Editor起動時にパッケージエクスプローラが消えてしまうため、RT System Editor起動時にRTCの起動ができないという事があるのですが、RT System Editorはそんなことは想定していません。諦めてください。
ただRTC起動時にコネクタを接続する方法はあるため、別にRT System Editorは必須ではないです。
Eclipse CDTでデバッグできたらいいような感じもしますが、どうせeclipse上でC/C++パースペクティブに切り替えなければならないのでVisual Studioを起動しても大差ないです。
結論を言うと、OpenRTM-aistが使いづらい原因の9割ぐらいはRTC Builder、RT System Editorにあるため、これがどうにかならないといかんともしがたいです。ユーザーの作業を減らそうという方向のようには見えないし、今後改善する見込みは薄いように思います。
にほんブログ村のロボットのカテゴリから
全然人が来ない・・・